


Сборка квадрокоптера под управлением iNav на раме RealAcc X210

Так уж получилось, что мой любимый квадрокоптер меня покинул. Больше всего мне в нём нравился режим удержания высоты, летать в котором очень просто и комфортно. Учитывая, что у меня остался ещё один квадрокоптер, резвость которого не поддаётся моему обузданию, я задумал весьма необычный проект. А именно: переделать этот гоночный квадрик под iNav. Аппарат должен получиться весьма лёгким, но при этом не настолько резвым, чтобы это стало для меня проблемой.
Во многих аспектах, данная статья выражает субъективное мнение автора. Спорить с ним бесполезно, он упёртый.
Комплектующие
Кое-что из комплектующих мне пришлось поменять, но всё обошлось малыми затратами, так как старые деталей я сразу продавал. По факту, к уже имевшемуся квадрику надо было добавить барометр и OSD, которая в прошлой версии квадрика физически не влезла в корпус. Дабы не городить огород и иметь возможность удобной настройки, надо было поставить ПК с OSD на борту. Самым очевидным решением был бы Omnibus F4, тут есть OSD и барометр, но... нет I2C. В данный момент этот протокол мне не нужен, но если позднее я захочу добавить GPS и компас (по отдельности от них мало толка), с Omnibus F4 это будет невозможно. Как следствие, поддержка этого ПК прошивкой iNav пока тоже не полная. Уже на момент написания статьи и после того, как квадрокоптер был собран, вышла прошивка версии 1.7.3, где поддержка I2C была реализована, но пока только на AIO-версии (без OSD). Поэтому я остановил свой выбор на более старом Omnibus F3. У этого ПК нет никаких проблем с I2C. Версию я брал обычную. В Pro-версии был добавлен датчик силы тока, что определённо не пошло ему на пользу. ПК, говорят, стал глючнее из-за наводок от питания, а распиновка ухудшилась.
Также пришлось заменить видеопередатчик Foxeer FX799T. Он сгорел и я не имею ни малейшего представления, почему. Он успешно пережил миграцию на новую раму, без антенны я его не включал (она была намертво прикручена). Примечательно, что сгорел он сразу после установки конденсатора. По идее, он тоже не мог повлиять, так как питался видеопередатчик через BEC на PDB. В качестве замены использовал DYS MI200MW Pigtail, купленный по случаю и лежавший без дела. Антенн с разъёмом SMA Male у меня не было, так что пришлось докупить коротыша ZRC 50mm.
Кроме того, я решил заменить моторы RCX H2205 2633KV на нечто "поспокойнее". Официальный магазин AOKFLY на AliExpress предлагал комплект моторов R-Vector Fire Phoenix 2205 2300KV всего за $38. Учитывая хорошую репутацию данного производителя, раздумывать долго я не стал.
-
 Моторы AOKFLY R-Vector Fire Phoenix 2205 2300KV
Моторы AOKFLY R-Vector Fire Phoenix 2205 2300KV

Из мелочей купил защиту моторов специально для рамы RealAcc X210 и пластиковые кожухи для регуляторов. Приёмник Flysky FS-A8S я решил заменить на Turnigy TGY-iA6C, стоявший ранее на RoboCat`е. Он больше по размерам, но у него есть failsafe и две антенны.
Схема проводки
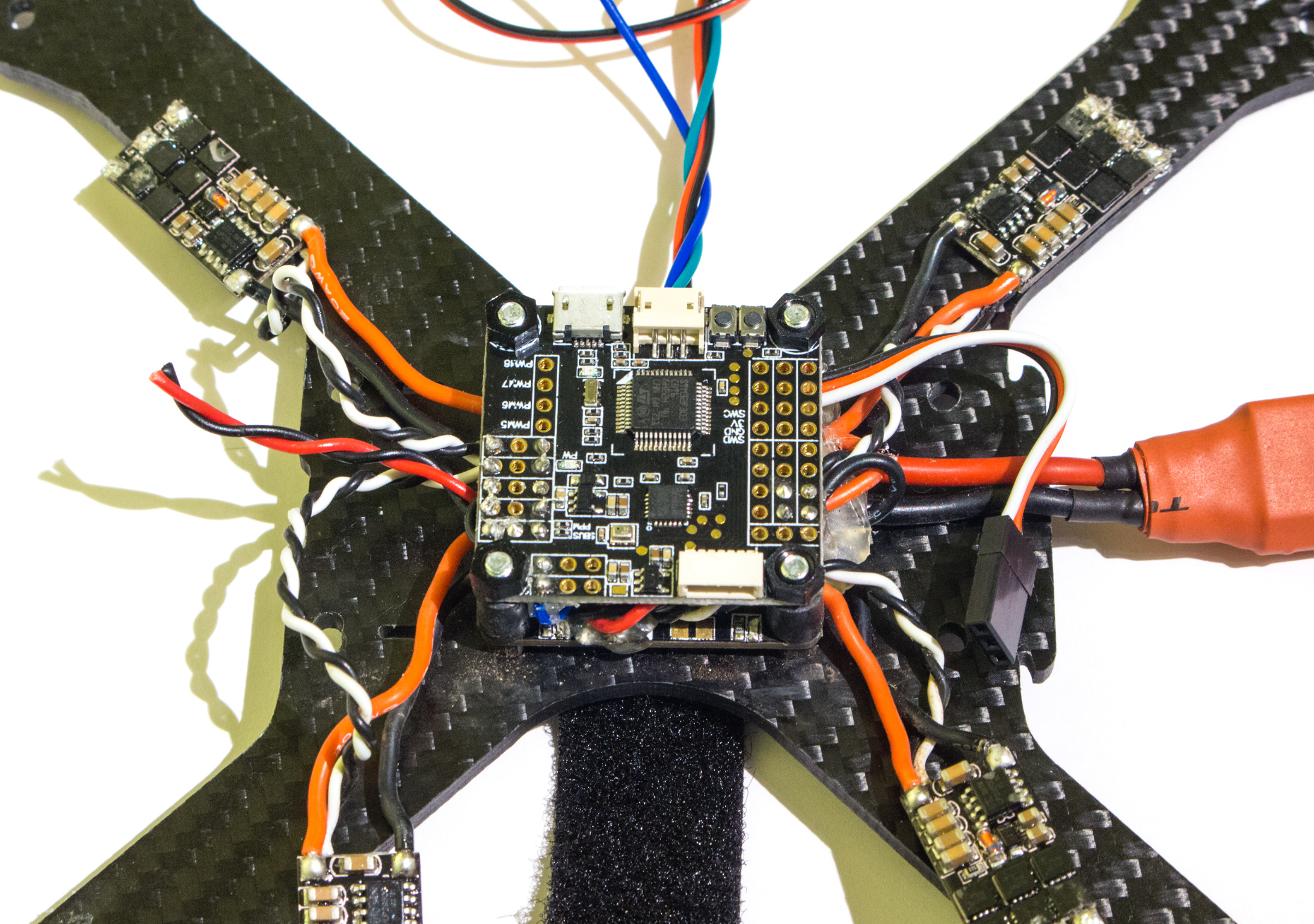
Omnibus F3 - совершенно новый для меня контроллер и разбираться с проводкой пришлось с нуля. К сожалению, официальный мануал составляли любители паззлов и там нет единой схемы, где было бы и обозначение разъёмов и их распиновка, как это сделано в инструкции к SP Racing F3. Благо, такие схемы можно быстро нагуглить. Описание поначалу тоже показалось не простым: что за RAM-контакты, что с ними делать? Потом начал рисовать схему (ту, что ниже) и всё сразу встало на свои места. Не вижу смысла питать ПК от BEC'а на PDB , так как vbat пришлось допроводить бы в любом случае (для OSD). Непосредственно от ПК у меня запитан только приёмник, так что никаких перемычек для RAM я не ставил. FPV питается от 5в с PDB. От конденсатора в питании решил отказаться. Он большой и не факт что есть в нём необходимость: квадрик не гоночный, просадок напряжения от резких перегазовок быть не должно. Итоговая схема получилась достаточно просто и лаконичной.

Схема проводки квадрокоптера
Сборка
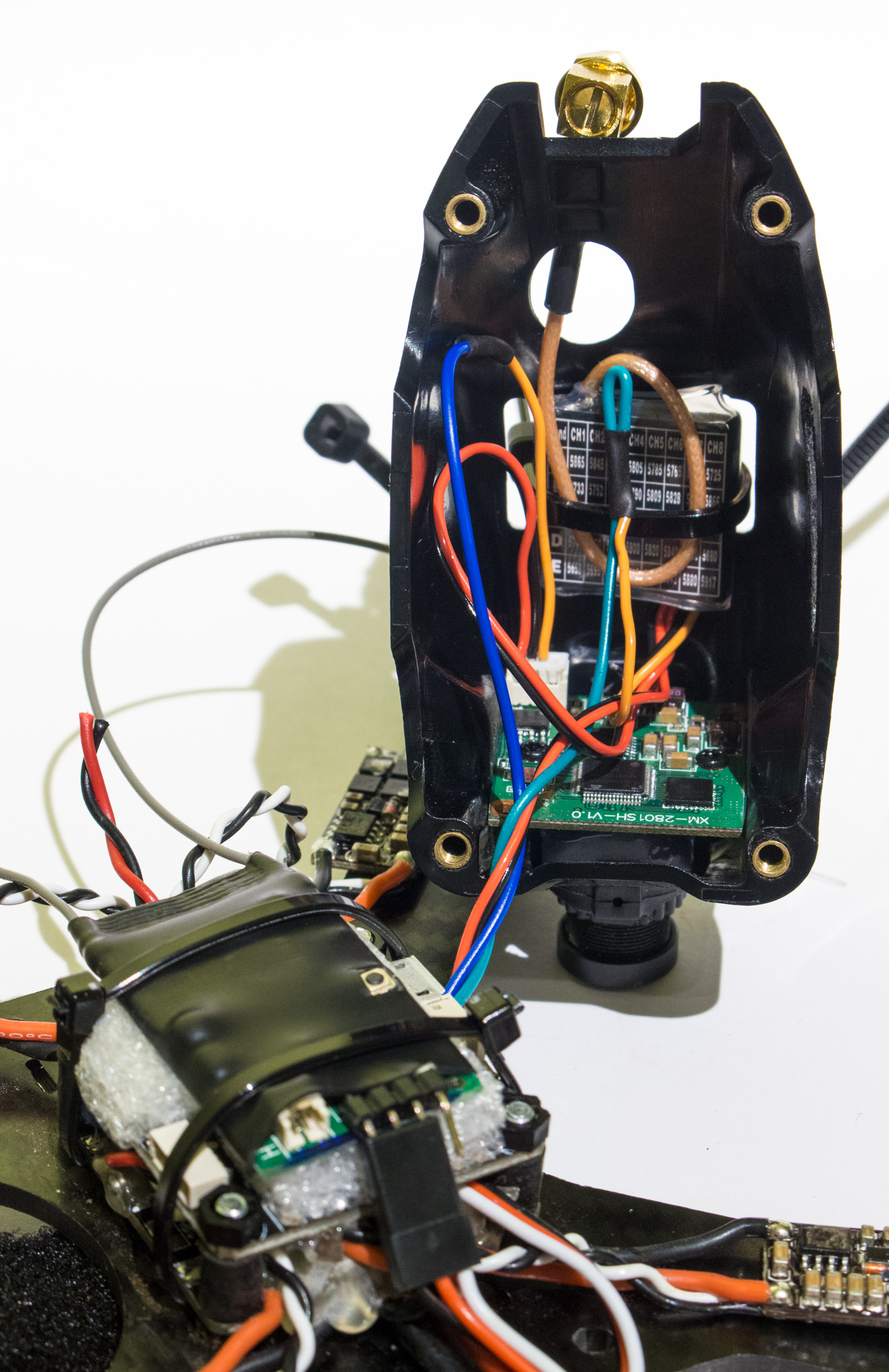
На момент обдумывания компановки трудность выявилась всего одна - новый приёмник в три раза больше старого. Пришлось сильно сдвигать камеру вперёд. Раньше я этого не делал по двум причинам. Во-первых, хотелось, чтобы камера полностью была в корпусе, который защитил бы её при аварии. Во-вторых, передняя часть корпуса имеет меньшую ширину (в моём варианте 28,4мм) и камера Sony Super HAD CCD 600TVL, ширина которой по спецификациям составляла 28мм, по факту туда не помещалась. Пришлось сточить 1мм платы и даже после этого она встала настолько плотно, что практически не регулировалась. Максимальный угол наклона составил 10-12 градусов, что совсем мало. Если этого не хватит, заменю камеру на что-то более компактное. В верхней части корпуса проделал отверстие, чтобы был доступ к кнопке смены частот на видеопередатчике.
На ПК я положил поролоновую подложку и на неё - приёмник. Надеюсь для барометра это будут благоприятные условия. В USB-разъём ПК воткнул головку магнитного кабеля. Они отлично себя показали и я теперь всегда использую их на квадриках.

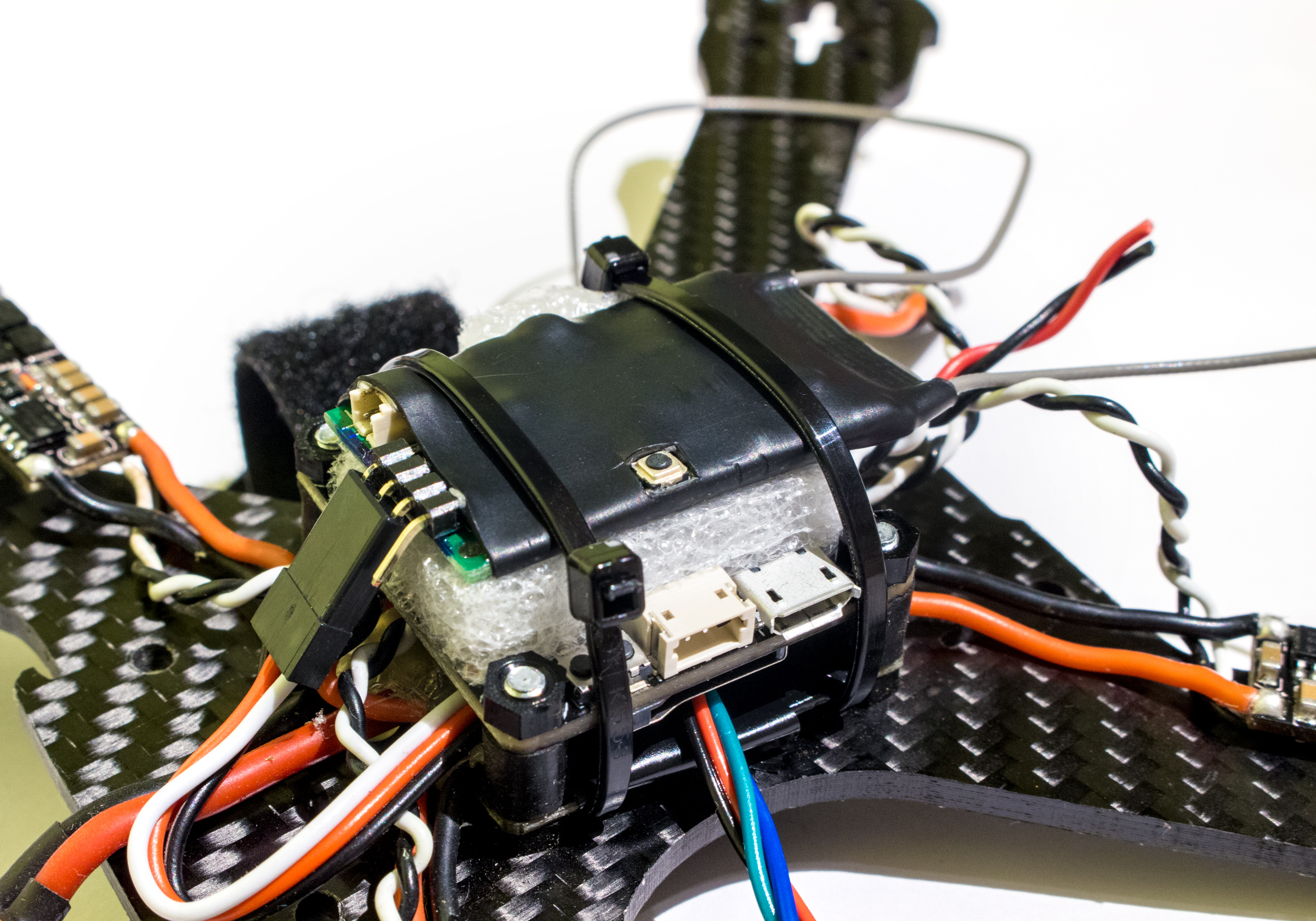
После установки ПК, необходимой пайки и сборки корпуса, я промазал торцы рамы суперклеем. Предыдущая рама этого квадрокоптера очень наглядно показала, что китайский карбон со временем расслаивается. Новые моторы имеют разную направленность вращения, так что надо было сразу установить их правильно. Я решил не отказываться от обратного вращения пропеллеров, которое делал в прошлой версии. О плюсах такой сборки рассказывает этот ролик. Что же до главного минуса - загрязнение боковых разъёмов ПК, то у меня разъём в корпусе, а единственное отверстие сбоку я заклею изолентой. Сами моторы ставил на "софт маунт" - подложку из двухстороннего скотча, которая должна снизить вибрации. Кстати, впервые ставил защитные кожухи моторов под лучи. Мне этот вариант не очень понравился, субъективно, на лучи - лучше.


Со сборкой всё.
Настройка iNav
Прошивка Omnibus не так проста, как у других ПК. Благо, я уже знаком в этим процессом и описывал его тут. На самих настройках заострять внимание не буду, описывал их не раз. Главное - не забыть задать реверс моторов. Это делается следующей командой:
set yaw_motor_direction = -1
Честно скажу, летал на этом квадрике всего один раз и то дома в спальне. Так что это не полёт, а скорее простая проверка работоспособности. Квадрик не взвешивал, но не думаю что вес сильно изменился, должен быть в пределах 290г (без батареи).


Знатно накомментили: