


Сборка квадрокоптера на раме RC180 V2 (часть 1) - комплектующие и сборка

Захотелось новый квадрокоптер. Эксперимента ради, решил попробовать формат меньше, чем 250. 160 и ниже сразу отмёл, так как это уже больше комнатные летуны, а мне надо именно для улицы. В итоге остались 180-й и 210-й форматы, оба из которых достаточно популярны (не спорю, возможно, сейчас эта популярность накручена из маркетологических соображений). Я рассуждал так: у меня всегда оставался некоторый запас свободного места при сборке 250-го и 270-го, а значит 210-й я соберу без проблем. Но мне нужен челлендж, значит - 180.
Во многих аспектах, данная статья выражает субъективное мнение автора. Спорить с ним бесполезно, он упёртый.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них - наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер - это такой промежуточный формат, который "ни нашим, ни вашим". Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. "Промежуточность" 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой - то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга - увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость - уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре - добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными - не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. "В народе" на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.

Фото Евгения Кравца
Для своего квадрика моторы я взял - RCX H2205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX - вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу "больше челленджа":
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A - недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T - компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-"клевер" BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Лучше всего использовать PDB с импульсным BEC'ом на 5В и линейным - на 12В. Я выбрал Matek Mini Power Hub. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил такую.
Пропеллеров, как всегда, взял много и сразу: Gemfan 4045 Bullnose, Gemfan 3-blade 4045 Bullnose Glass Fiber и хвалёные DYS 3-blade 4040 Bullnose.

Фото Евгения Кравца
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. Свой первый квадрокоптер я собирал на CC3D. Выбрал я его исключительно из-за цены, так как Naze32 на тот момент стоила вдвое дороже. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и "пищалка". Его преемник CC3D Revolution - это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€. На нём я собирал свой второй квадрокоптер.
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. В прошлый раз я отказался от него, так как мне показалось, что в сети недостаточно информации о нём. Сейчас совершенно точно могу сказать, что это не так и даже официальный мануал крайне информативен. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
Схема проводки
Схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика. По идее, можно было бы и от PDB, но мне так показалось безопаснее. Ни в коем случае не стоит питать камеру напрямую от батареи. Во-первых, это приведёт к помехам от регуляторов. Во-вторых, при включении активного торможения, регуляторы дают скачок напряжения и камера сгорит. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать.
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- "землю", идущую от видеопередатчика к камере, также необходимо подключить к OSD. В противном случае картинка OSD будет моргать (проверено личным опытом).
- Vbat подключен к ПК, а не к OSD. Почему именно так, писал тут.

Схема проводки квадрокоптера
Сборка
Сборку квадрокоптера я уже описывал два раза (первый и второй), так что на этот раз остановлюсь лишь на тех вещах, которые специфичны для 180-го размера, либо для используемых комплектующих. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов. Кстати, регуляторы желательно крепить как можно ближе к моторам, в противном случае, погнувшийся кончик лопасти пропеллера может срезать детали с регулятора.

При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение). Все резьбовые соединения усиливал "Локтайтом" средней фиксации (синий).
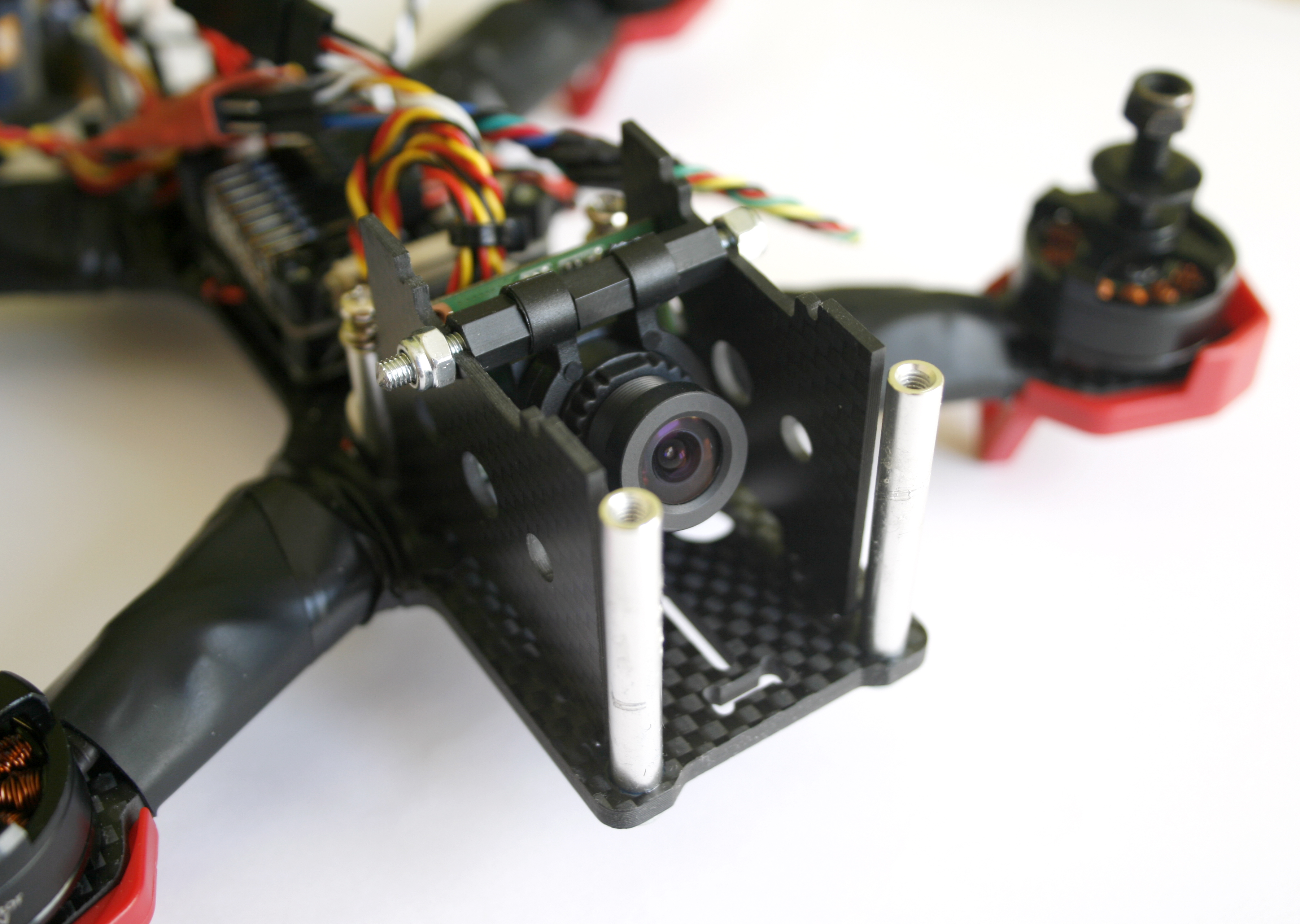
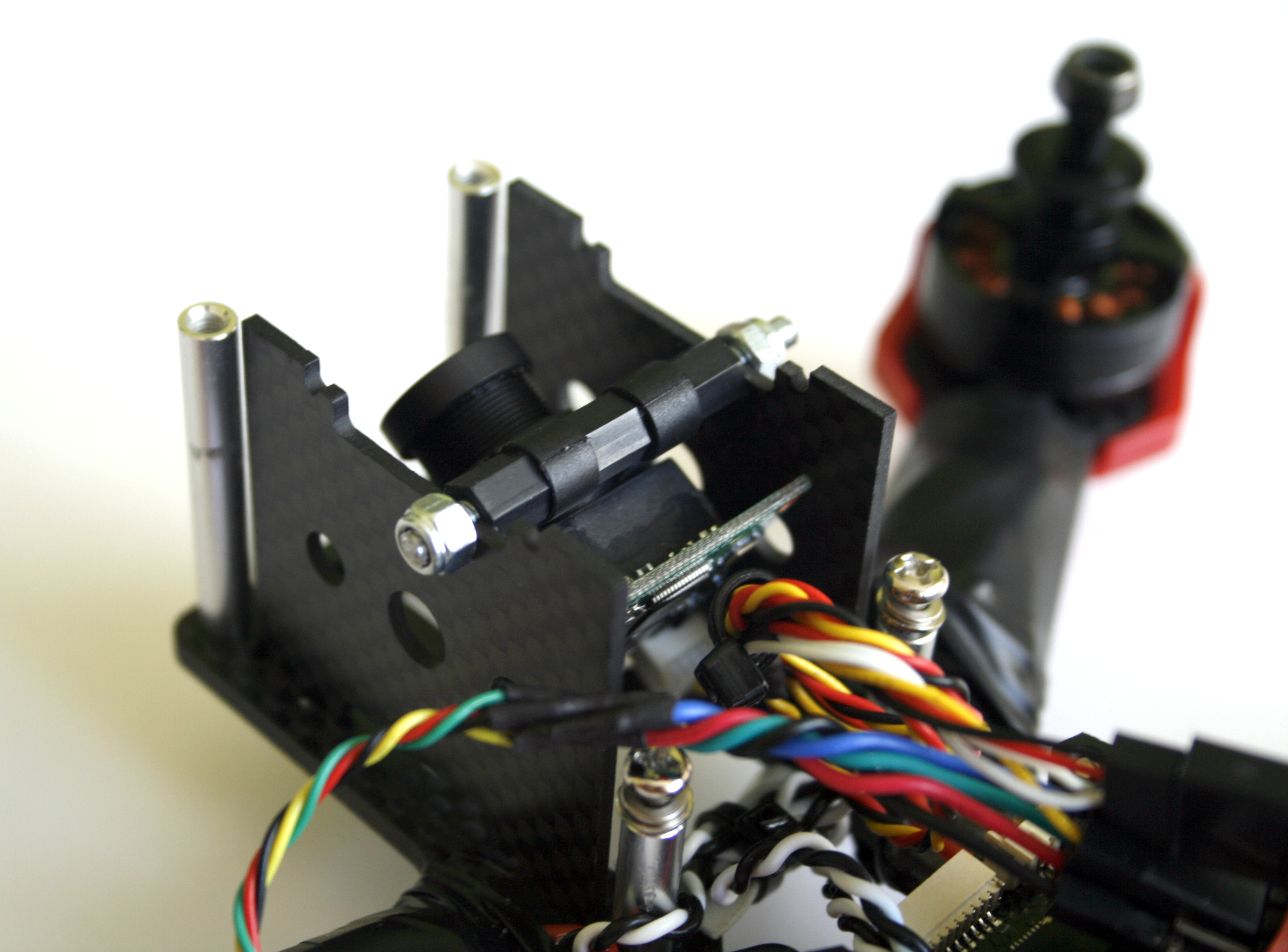
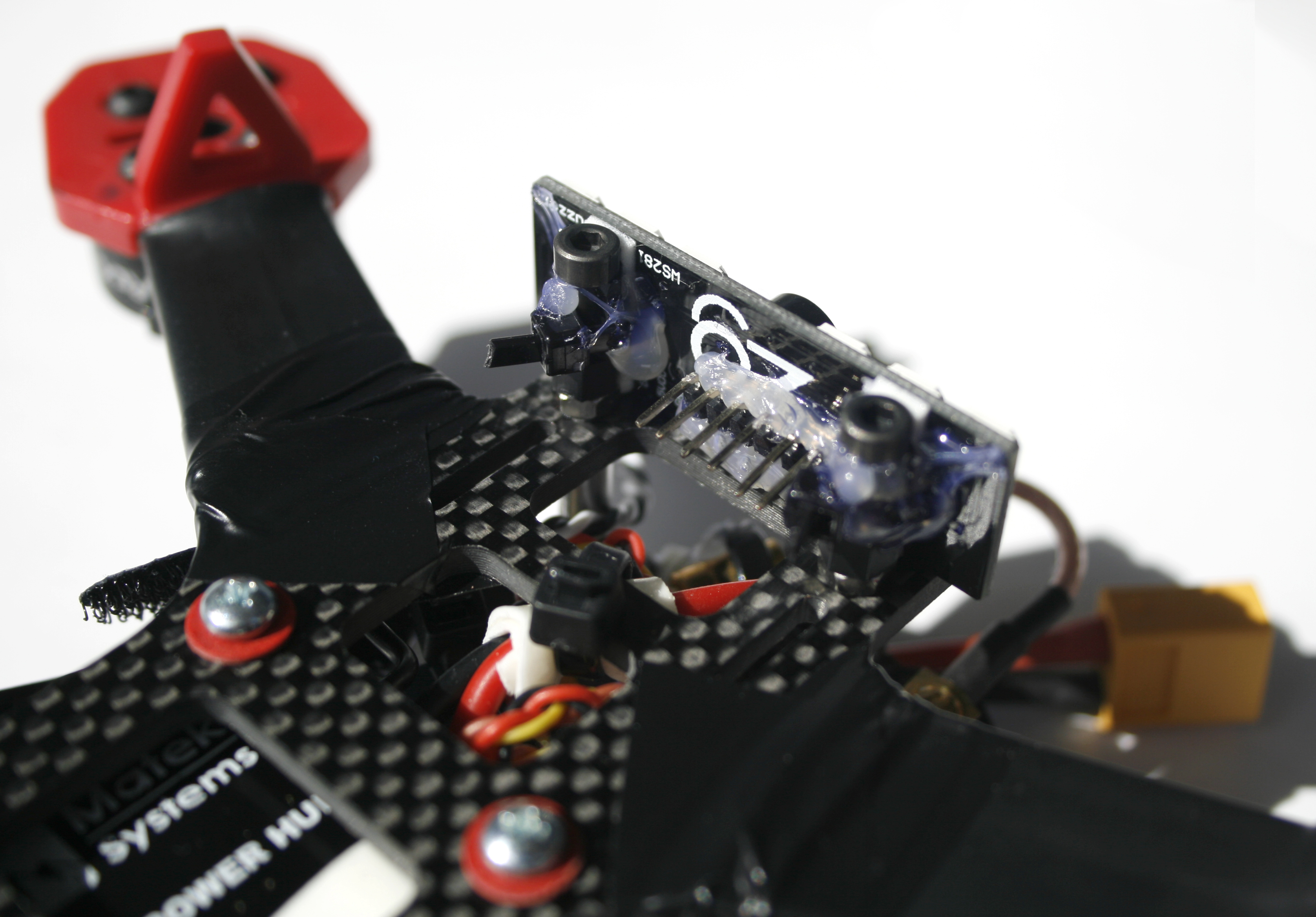
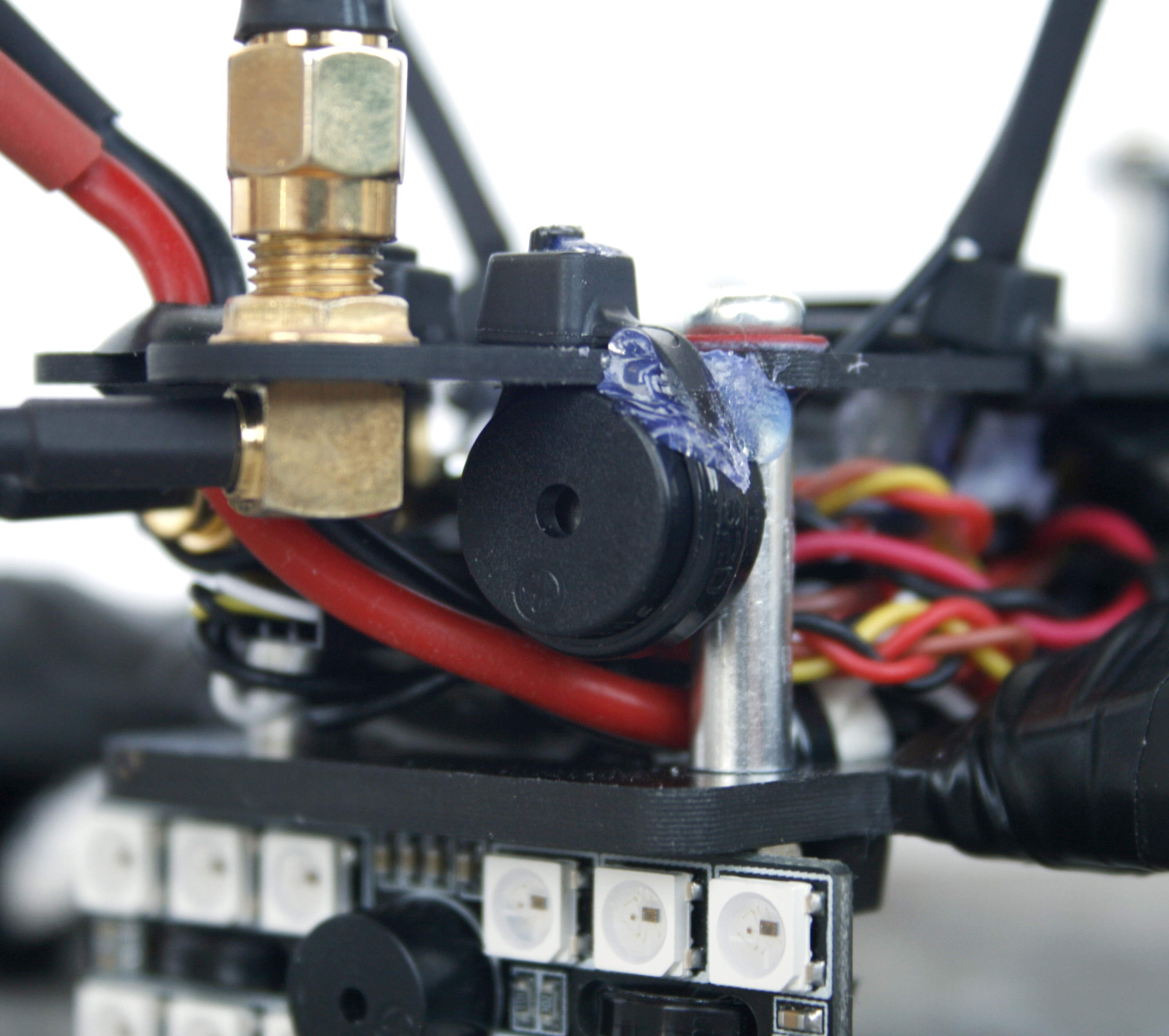
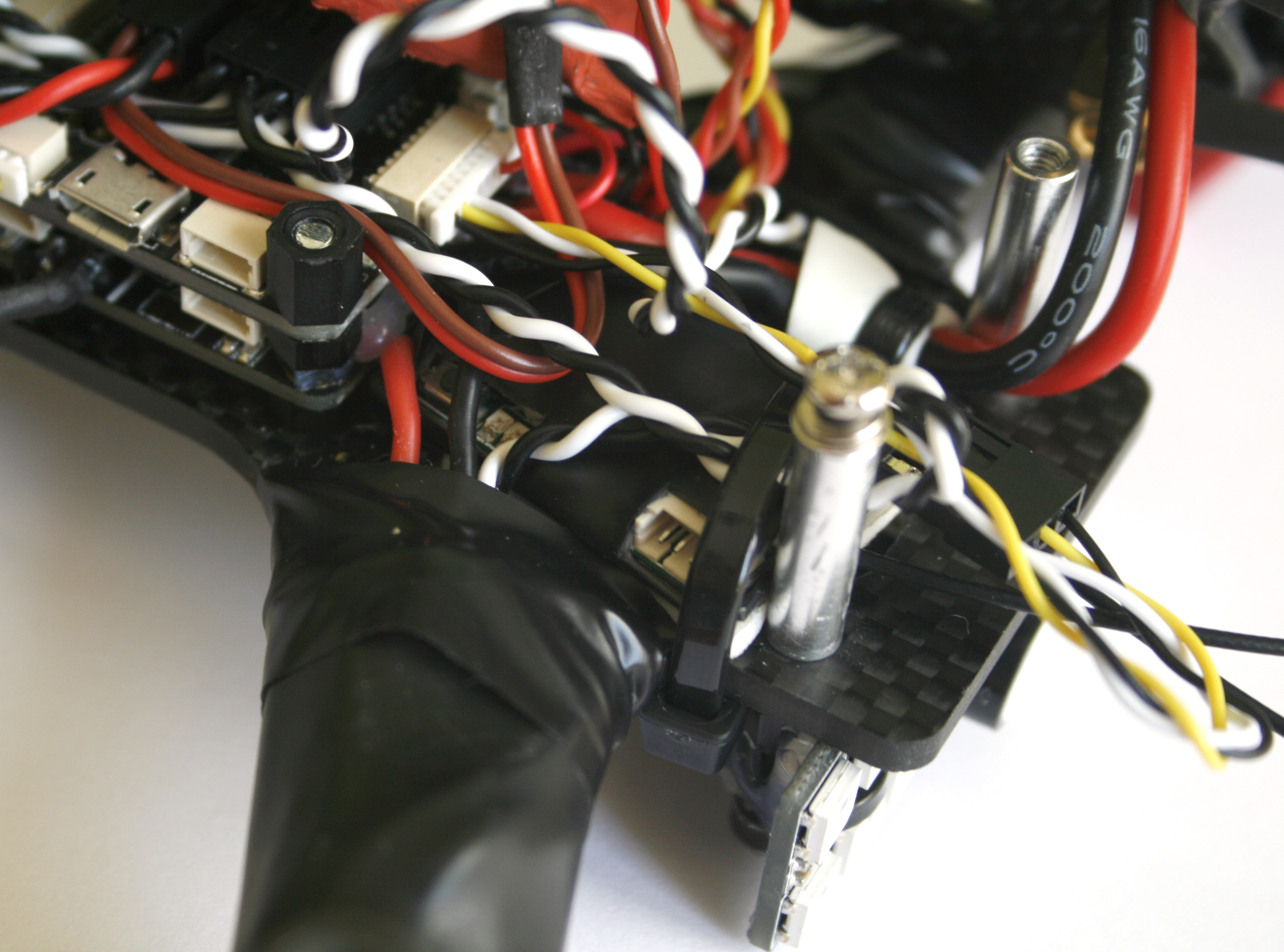
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.

Диапазон углов наклона курсовой камеры
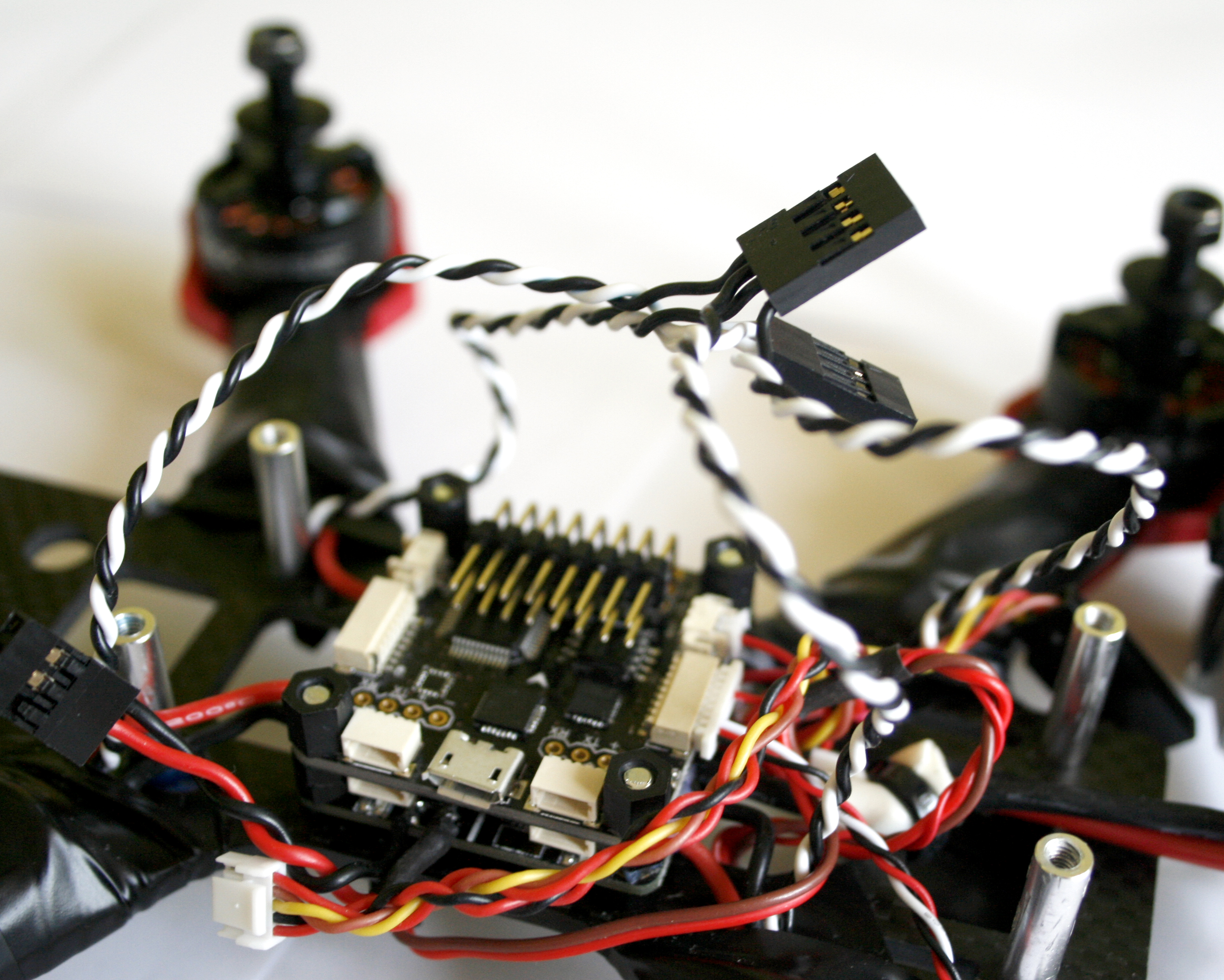
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 "на всякий пожарный") я припаял коннекторы к сигнальной площадке и "земле", для остальных трёх - к "плюсу" и "земле", чтобы можно было запитать сам ПК и уже от него - подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём "пищалки". Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней - он продублирован контактными площадками. Закавыка в том, что у клона "земля" на разъёмe постоянная и при его использовании "пищалка" всегда будет активирована. Нормальная рабочая для "пищалки" "земля" выведена только на контактную площадку. Это легко проверяется тестером: "плюс" разъёма прозванивается с "плюсом" на контактной площадке, а "минус" - не прозванивается. Следовательно, надо припаять провода для "пищалки" к нижней стороне ПК.
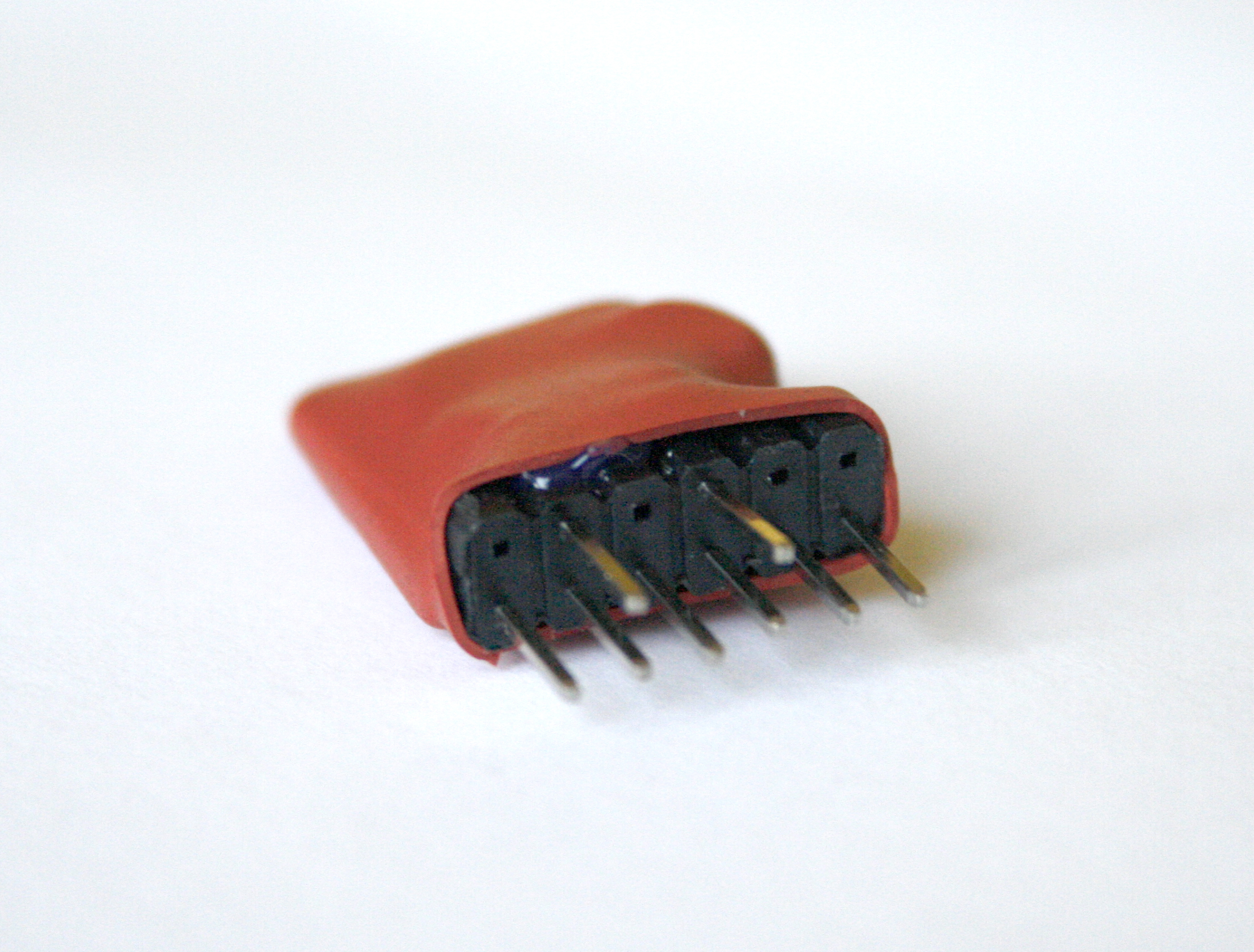
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но в этом случае, если понадобится подключать регуляторы к программатору, надо будет мастерить переходник. Вместо этого, я взял два четырёхконтактных штекера и вставил в один "землю" всех регуляторов, во второй (соблюдая порядок подключения моторов) - сигнальный провод.
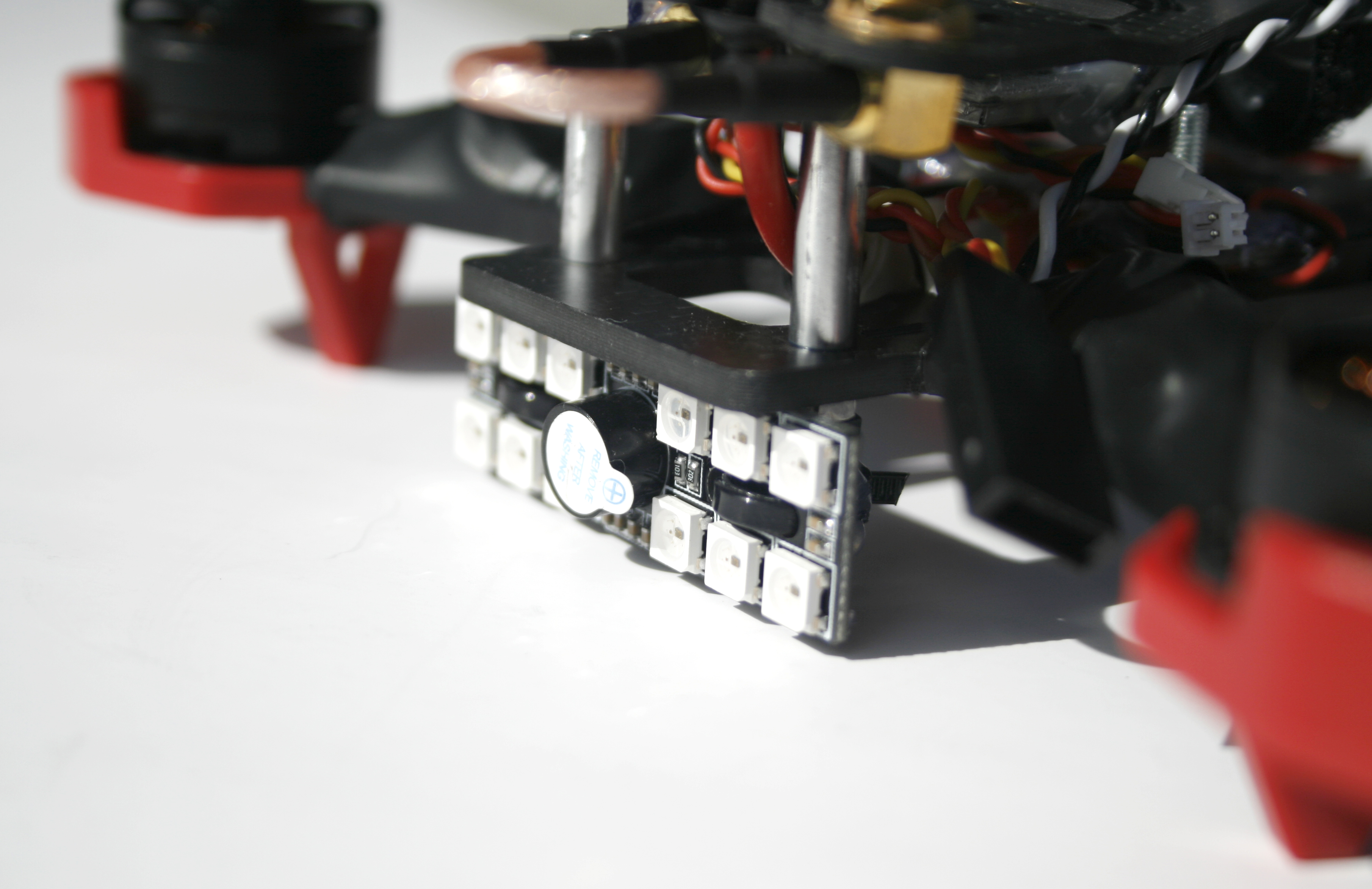
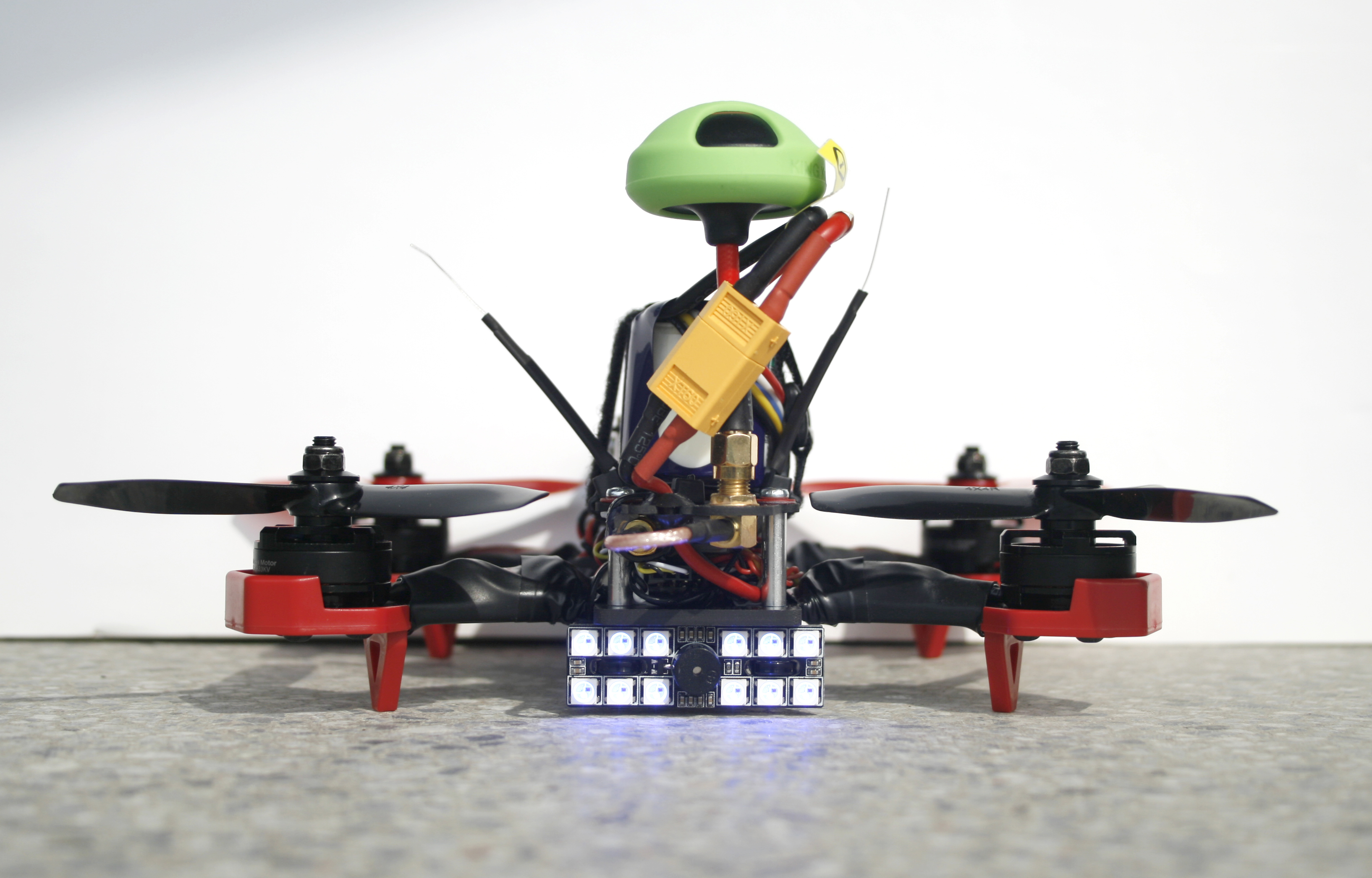
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры - под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую. На самом деле, даже её громкость - так себе и, если кому-то надо больше, можно собрать действительно громкую пищалку.
Позднее я нашёл статью по сборке, в которой автор не подключает "плюс" на подсветку, так как на плате он соединён с "плюсом" пищалки. Но там совсем другая плата. У моей ни один контакт пищалки не прозванивается ни с одним контактом подсветики. Тем не менее, возможно требуется какое-то особое подключение, о чём производитель не потрудился мне сообщить.
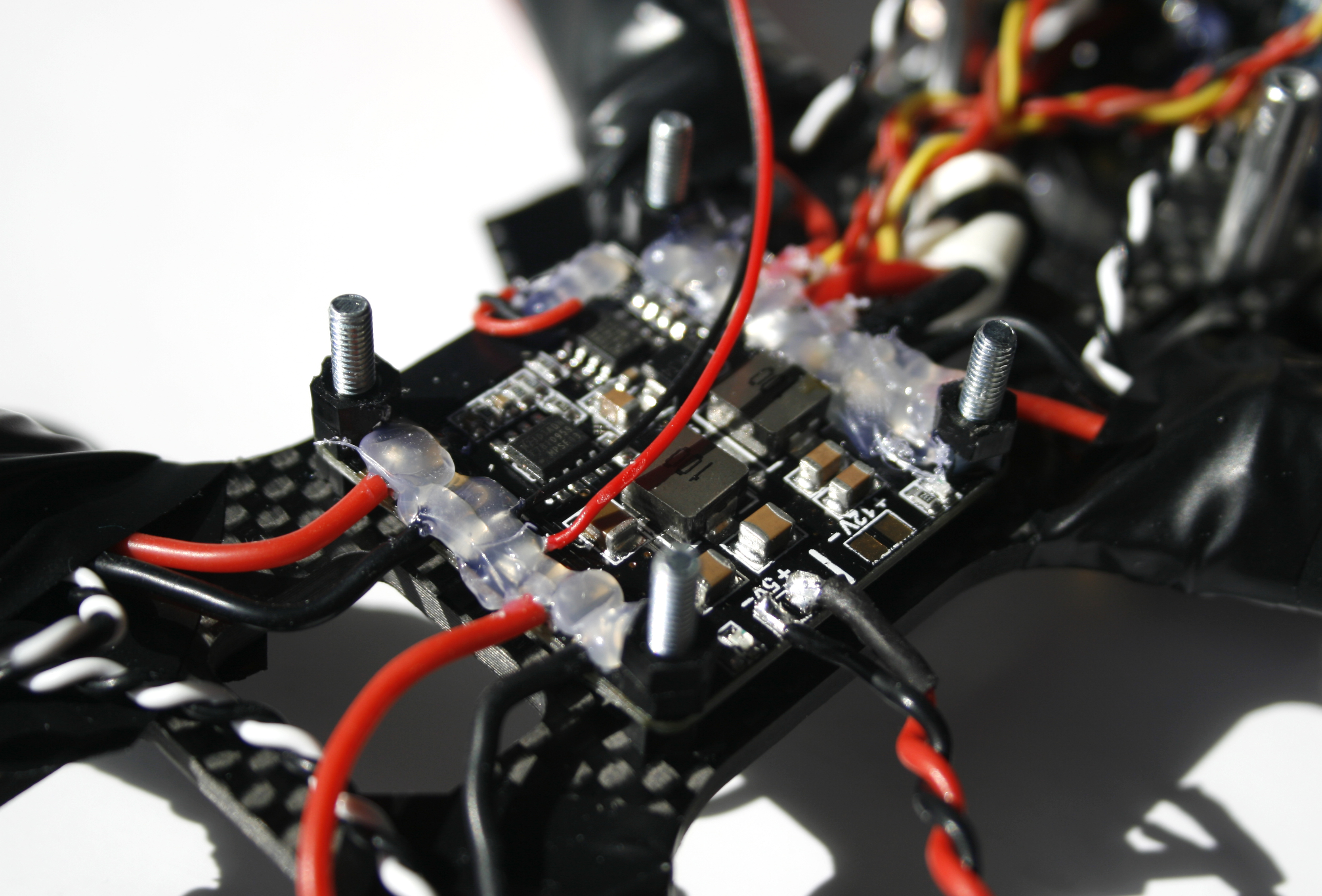
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.

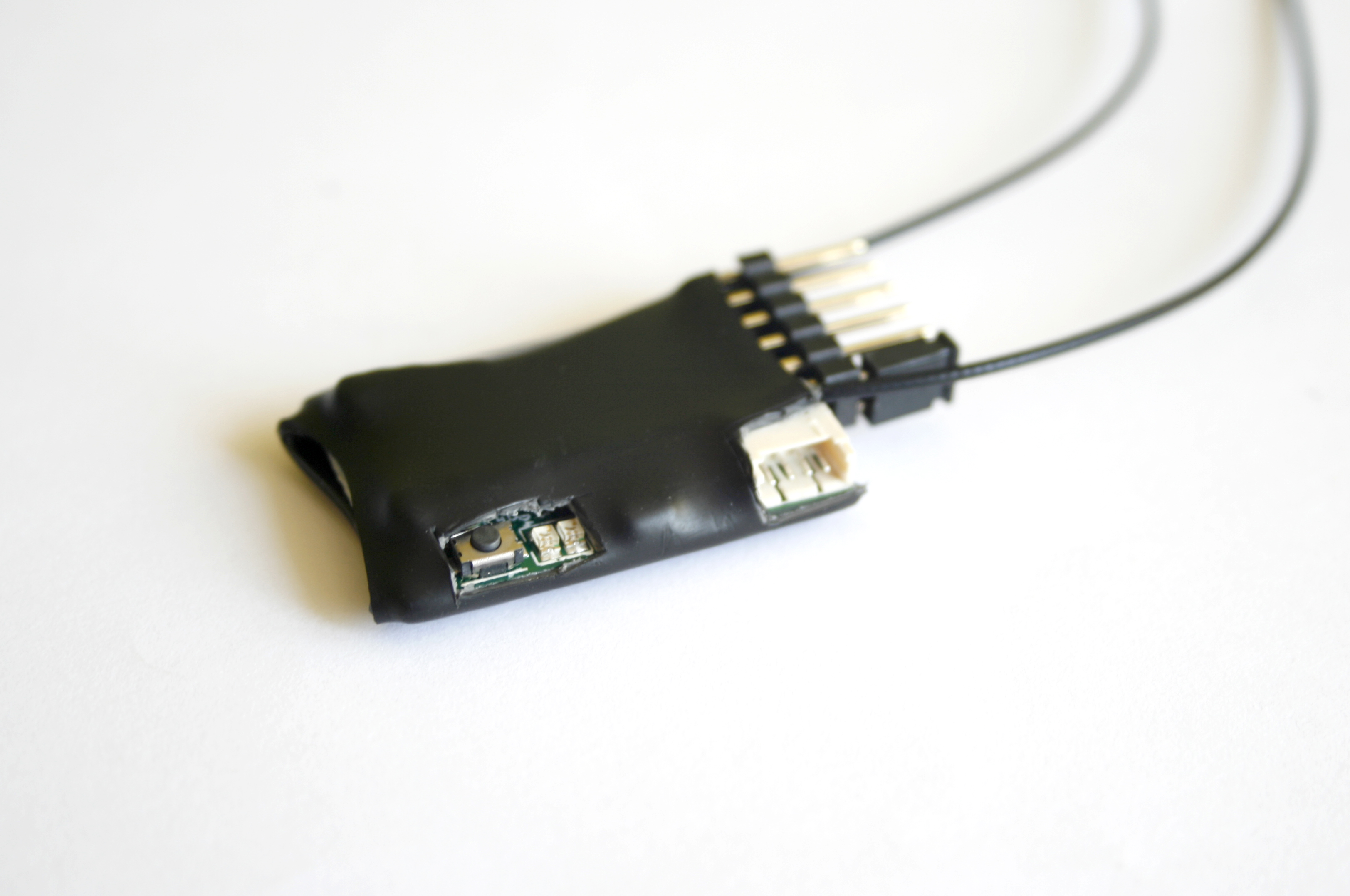
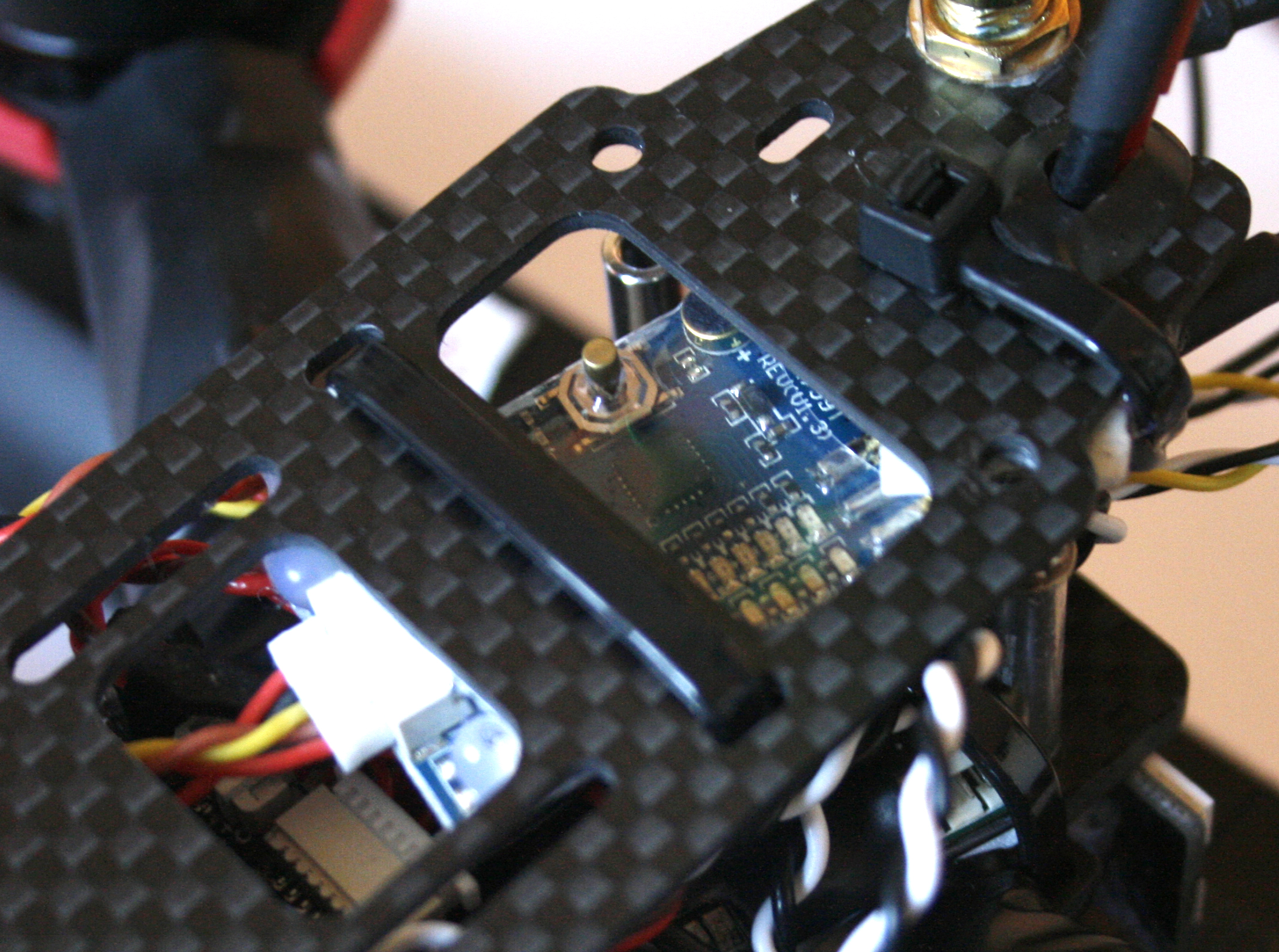
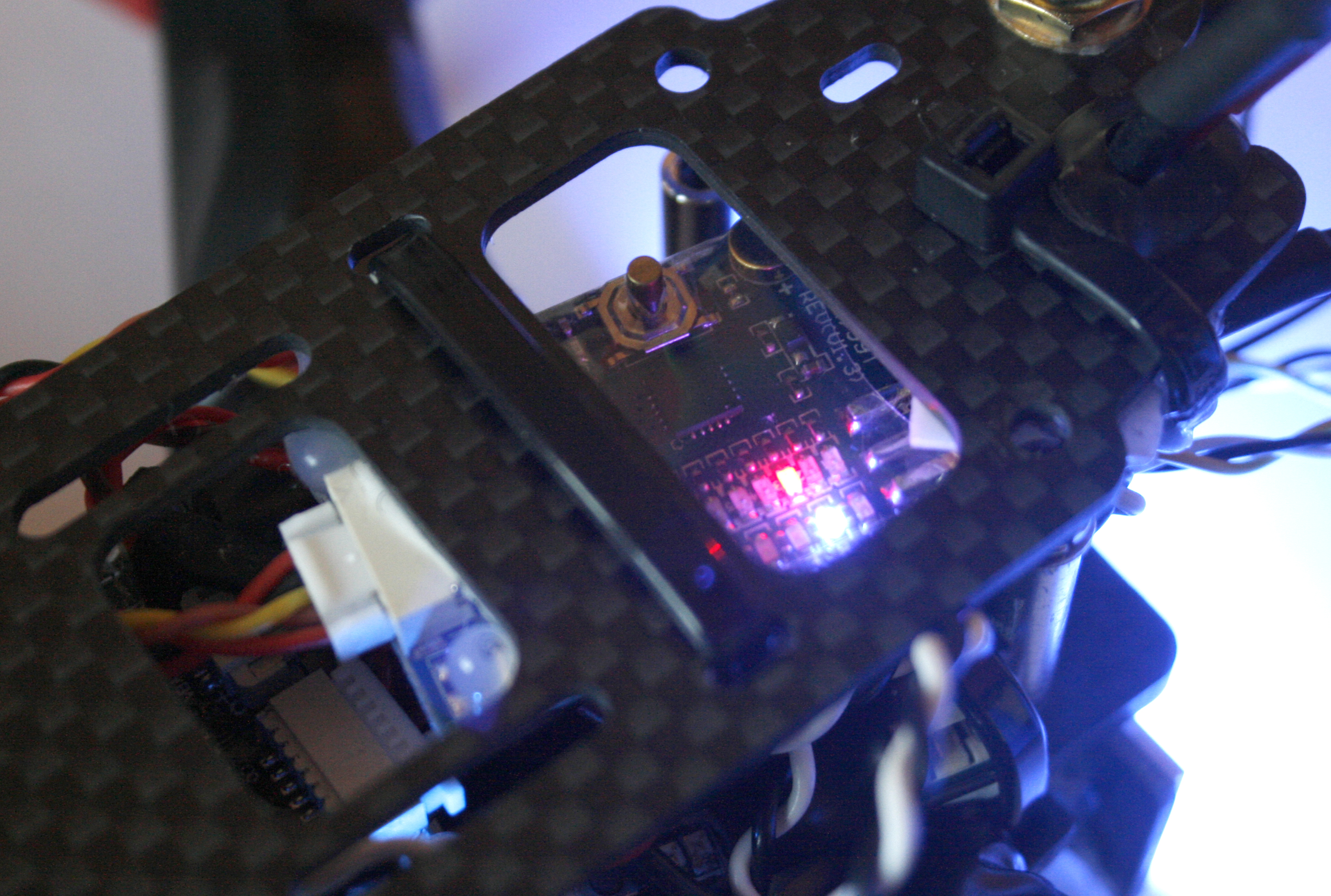
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
 Приёмник (ещё с коннекторами).
Приёмник (ещё с коннекторами). Место расположения приёмника.
Место расположения приёмника.
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
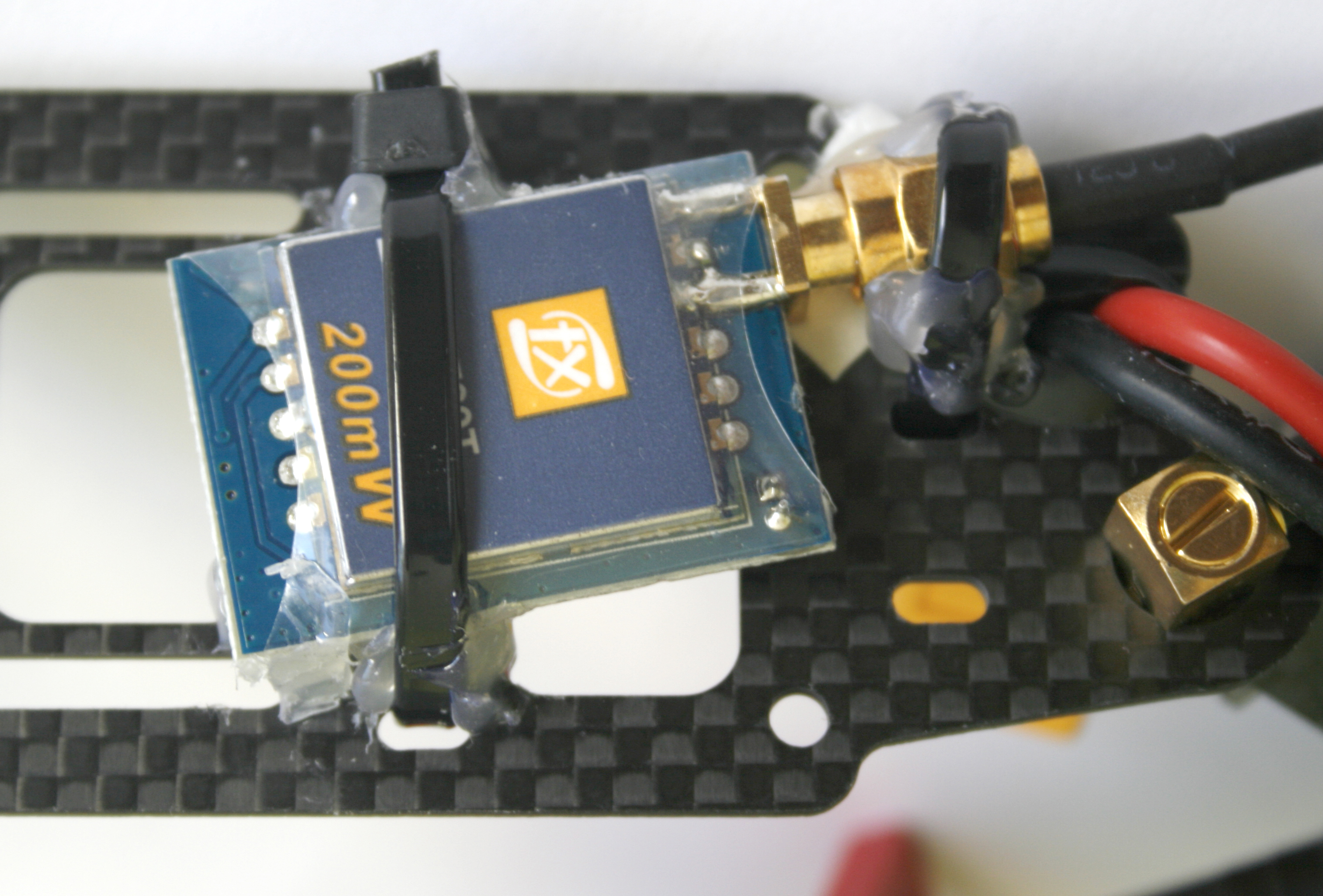
Видеопередатчик.
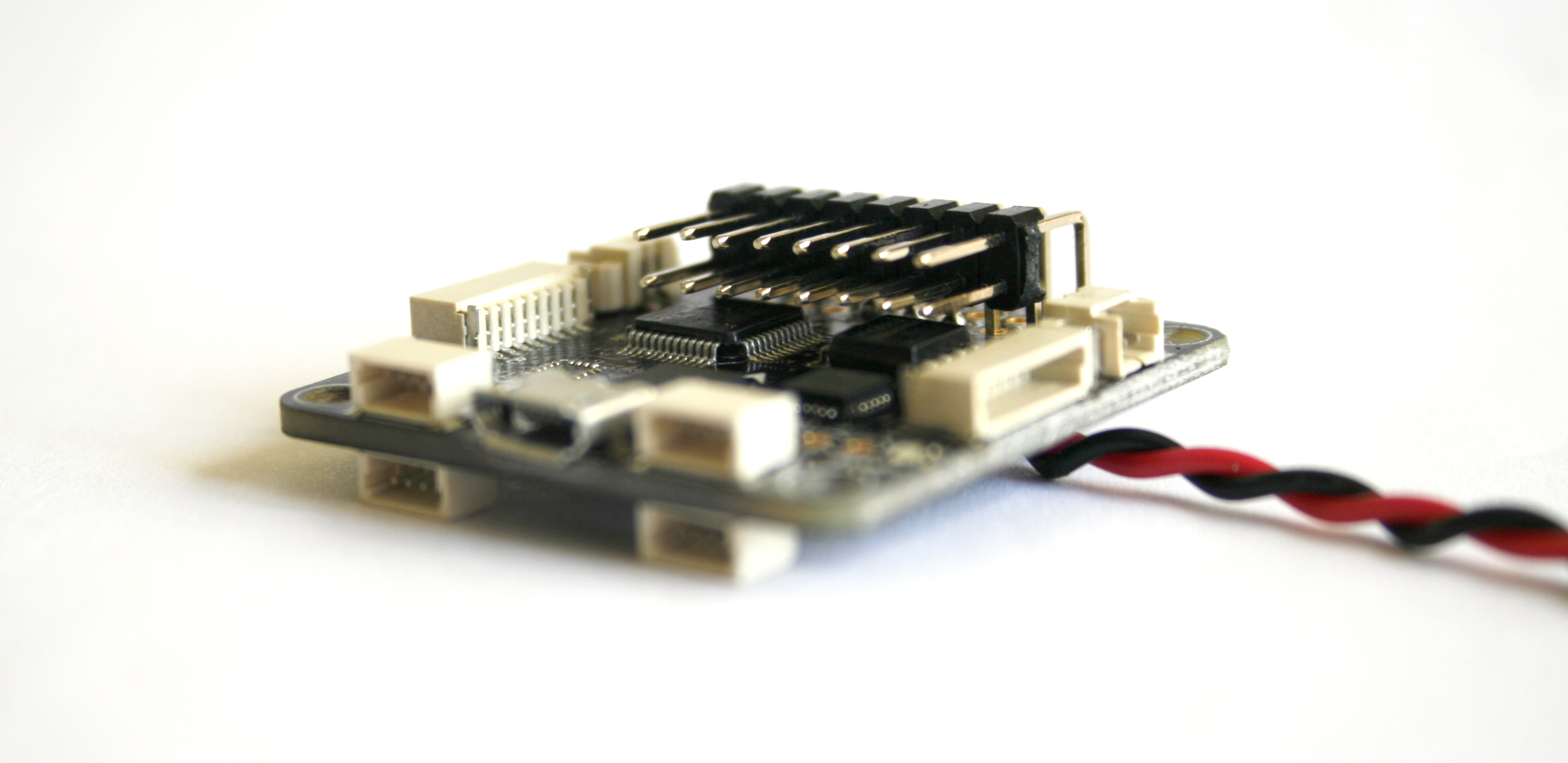
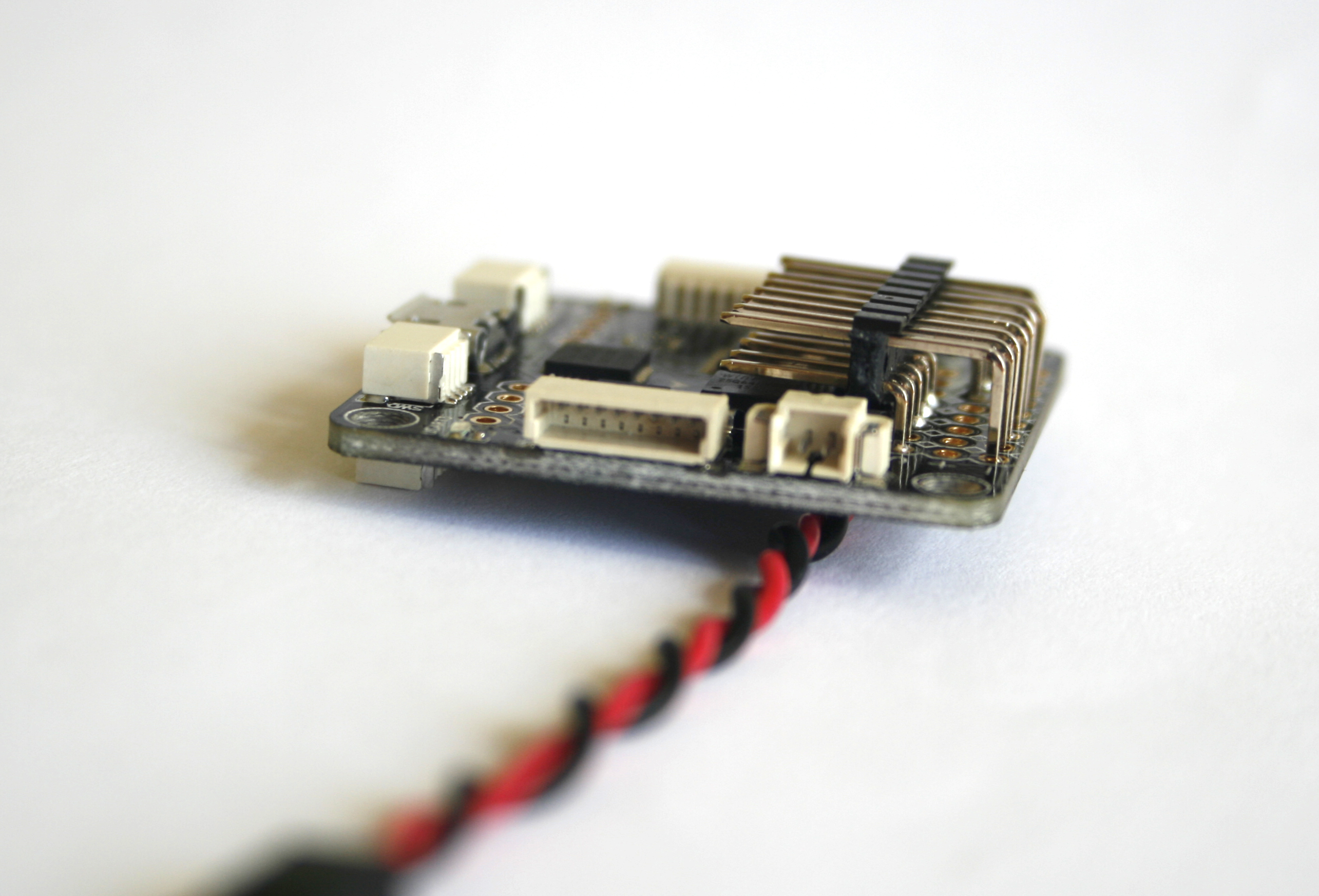
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. В прошлый раз коннекторы торчали у меня аж в три стороны, в этот раз я реализовал всё более лаконично: взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Micro MinimOSD с припаянными коннекторами и в термоусадке.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Уже позднее я купил магнитный USB-кабель. Его использование показалось мне разумным, чтобы лишний раз не мурыжить USB-разъём на полётном контроллере. Наконечник кабеля зашёл достаточно плотно, так что не должен потеряться.

Магнитный USB-кабель
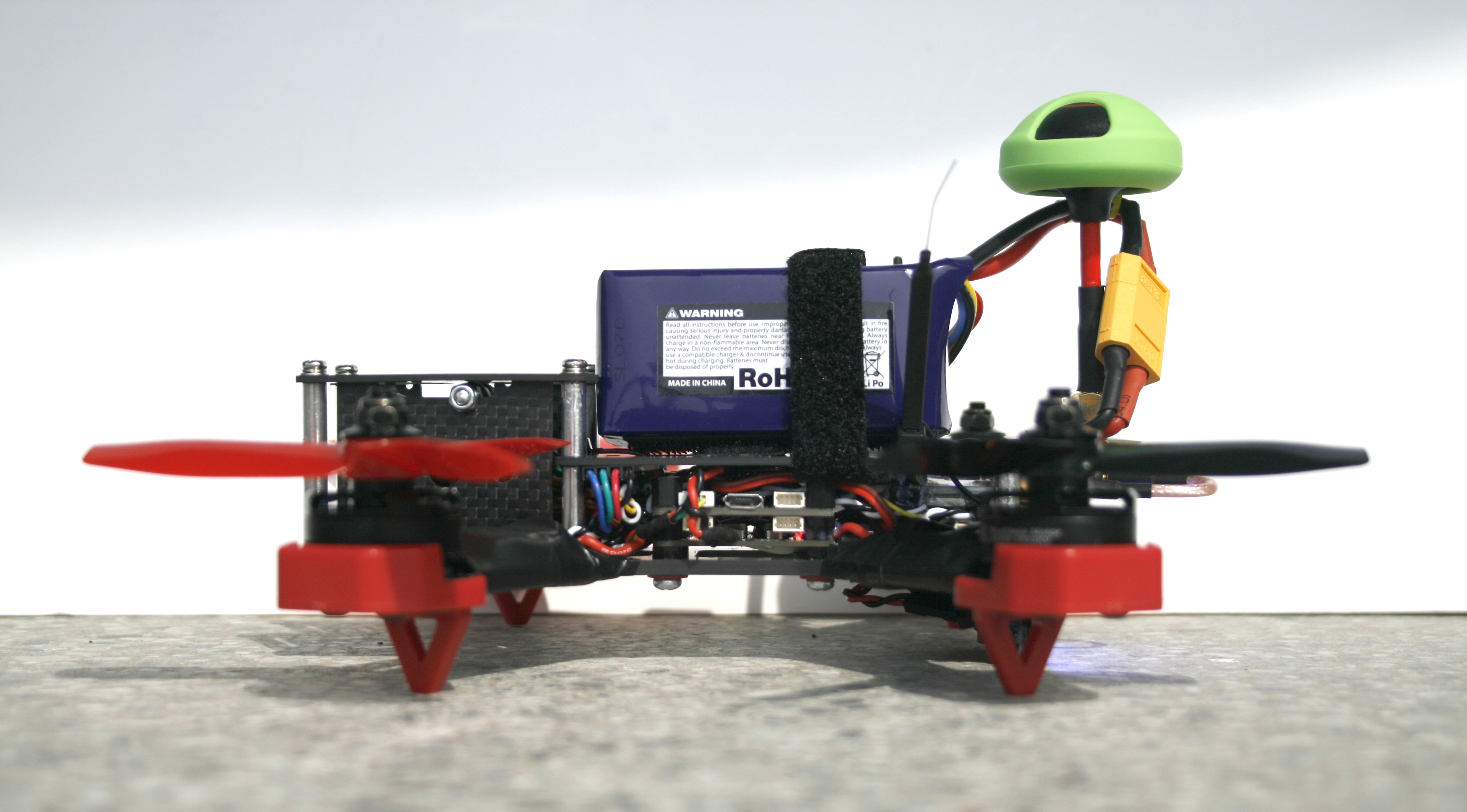
Сборка на этом подошла к концу. Мне самому понравилось. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Масса квадрокопрера без батареи составляет 330г, с батареей - 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.




Знатно накомментили:
С ВМГ у меня не всё по феншую: пропы балансил, а моторы - нет. По-хорошему надо было их тоже проверить.