


Установка подвеса Tarot T2D на Blade 350 QX

Квадрокоптер Blade 350 QX и подвес с камерой, как хлеб и Rama - созданы друг для друга. К сожалению, подвес от производителя квадрокоптера появился в продаже только на днях. Вдобовок, это совершенно новый продукт с возможными "детскими болячками" и скудной (на данный момент) документацией. В итоге, когда подошёл момент покупать подвес, я сделал выбор в пользу Tarot T2D. Далее я опишу, как устанавливал его, а главное - как сделал регулировку угла камеры с пульта.
Во многих аспектах данная статья выражает
субъективное мнение автора.
Спорить с ним бесполезно, он упёртый.
Зачем и почему?
Для чего нужен подвес, объяснять не надо. Попробуйте хоть один раз поснимать видео с борта без подвеса и всё сразу станет ясно. А вот зачем регулировать угол наклона камеры (tilt) с пульта, если можно сделать это на компьютере? Сам я наиболее отчётливо это понял, когда был в отпуске с квадрокоптером, но без компьютера. Хотелось поснимать и панораму, и чтобы камера была вертикально вниз, и попробовать снимать пролёты. Ан нет...
Теория
Прежде всего, стоит сказать, что место, куда производитель установил антивибрационную площадку (туда же, кстати, ставится и их родной подвес), нельзя считать идеальным: оно слишком сильно смещено вперёд. Вероятно, это сделано для того, чтобы свести к минимуму возможность попадания в кадр моторов и пропеллеров, но при этом страдает общая развесовка летательного аппарата (даже с учётом того, что сзади находится тяжёлая батарея). Следствием последнего является усиленная нагрузка на два передних мотора, их повышенная скорость вращения и, вполне возможно, увеличение вибраций. Устанавливая подвес, имейте это в виду. В идеале можно найти центры тяжести квадрокоптера и подвеса и установить одно точно под другим.
Второй момент заключается в том, что Blade 350 QX, вроде как, изначально планировался как "к-подвесу-готовый", но что-то не срослось. В итоге, на его плате (слева от батареи, если смотреть сзади) есть разъём, к которому можно подключить подвес без платы и он будет работать, но не очень точно. Ну и разумеется, никаких настроек не будет. Тут и тут видео, снятые при таком подключении подвеса. Результат не впечатляет.
Теперь перейдём к регулировке наклона камеры с пульта. Есть два способа реализации этой возможности. Первый способ достаточно прост: вы подключаете к подвесу отдельный приёмник и управляете подвесом со второго пульта. Объяснение на английском есть здесь. Главным минусом тут является то, что в одиночку уже не управиться и нужен отдельный человек для управления камерой. С другой стороны, такой вариант проще и позволяет реализовать управление 3-осевым подвесом. По идее, можно использовать очень дешёвые азиатские приёмник и передатчик. Доверия к ним меньше, но в случае отказа вы только потеряете управление подвесом, а не всем квадрокоптером.
Второй вариант (который я и выбрал для себя) позволяет сделать всё на одном пульте, но он сложнее. Суть его в том, что к подвесу опять же подключается отдельный приёмник, но биндится он к передатчику параллельно с квадрокоптером. Да, два приёмника на одном передатчике. Невозможно? Описание в оригинале и от автора тут, а здесь и здесь два видео от него же. Перво-наперво, нужен старый, уже снятый с производства приёмник Spektrum AR7000. Возможно, подойдёт ещё какой-нибудь, но он обязательно должен иметь резолюцию 1024 и не менее 7 каналов (потому что 6 каналов уже заняты управлением квадрокоптером). Универсальные 1024/2048 приёмники вроде OrangeRx не подойдут, так как они автоматически переключают резолюцию на 2048. На этом видео товарищ использует приёмник OrangeRx, но я не понял, какой именно. Кроме того, нужен передатчик не ниже Spektrum DX7s, то есть с количеством каналов от семи и выше.
Ещё один нюанс: можно использовать приёмник и/или передатчик с 6 каналами. В этом случае подвес подключается к каналу Aux1. Этот канал используется самим квадрокоптером для функции возврата домой (Return to Home). Тут следует знать, что функция активизируется только на 85%, следовательно, можно использовать весь диапазон до этого. Такой вариант демонстрируется тут.
Практика
Итак, я приобрёл подвес Tarot T2D, б/у приёмник Spektrum AR7000, более высокое шасси для квадрокоптера и комплект (10шт) удлинителей балансировочного провода 3-баночных LiPo-батарей. Подвес пришёл в сборе, но я всё равно раскрутил все болты и посадил на Локтайт (на китайца надейся, а сам не плошай). Кстати, качество сборки оказалось хорошим.
Ещё один важный для меня момент: я хотел установить подвес так, чтобы его всегда легко и быстро можно было бы снять. Лучше всего для этого подходят крепежи action-камер или велосипедных спидометров. У меня уже был опыт общения с китайскими крепежами для камер, пластик которых становится очень ломким при температуре ниже 5-7 градусов, поэтому я взял оригинальный крепёж от GoPro. Закрепил я его примерно по центру квадрокоптера через фанерные пластины: одна с внутренней стороны корпуса, одна с внешней и на ней уже крепление от камеры. Наружной фанеркой я нивелировал небольшой угол наклона (относительно горизонта) "брюха" квадрокоптера. Приёмник Spektrum AR7000 я спрятал внутри корпуса квадрокоптера и он всегда подключен и работает, даже если подвес "отстёгнут".
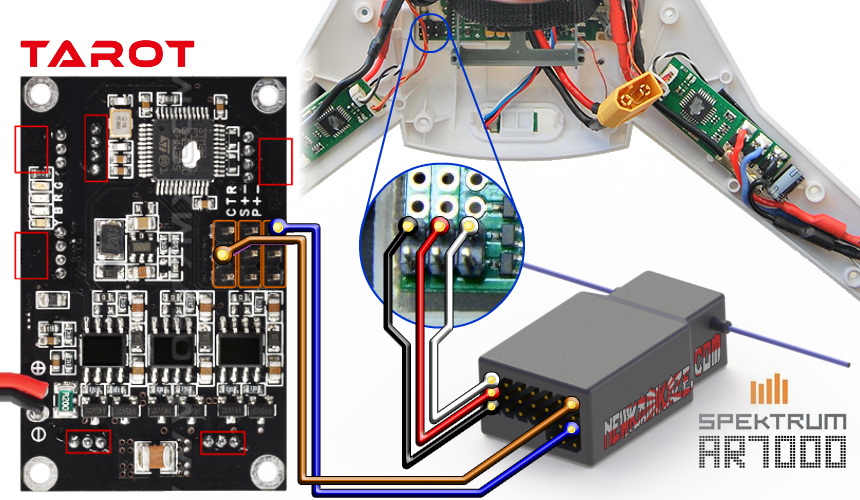
Все провода я тоже решил объединить в один шлейф, который легко можно отключить. Здесь-то и пригодились балансировочные удлинители, состоящие из четырёх проводов: два для питания подвеса и два (а не три!) для управления, которые пойдут в разъём Aux2 приёмника. На схеме ниже видно, куда конкретно подключаются последние два провода на плате Tarot.
Я сразу отказался от установки дополнительного аккумулятора для питания подвеса. Каждый грамм на счету и возить с собой батарею, которая не расходуется полностью к концу полёта, неоправданно. К счастью 3S батарея самого Blade для подвеса - самое то. Чтобы не лезть в проводку самого квадрика, я запитался через балансировочный разъём: берутся 2 провода по краям, красный - "плюс" и чёрный - "минус". Чуть сложнее оказалось с питанием приёмника, так как для него напряжение штатной батареи Blade 350 QX слишком высокое. Решение нашлось в виде неиспользуемого разъёма "для сервы" на главной плате квадрика, о котором я упоминал выше. Опять же на схеме показано, как это реализовано.
Таким образом, у меня получилась блочная конструкция, которая даёт дополнительные возможности. Например, можно сделать рукоятку с батареей использовать подвес отдельно в качестве стедикама (подробнее об этом ниже). Так же можно сделать FPV-комплект (камера + передатчик видеосигнала) и закреплять его на квадрокоптер без подвеса. Подвес для FPV совершенно не нужен, только лишний вес и более быстрый разряд батареи.
Bind (привязка)
Совершенно ничего мудрёного, надо только заранее переключить передатчик в режим DSM2, иначе 2 приёмника не забиндить. Ставим bind-перемычку в Spektrum AR7000, включаем квадрокоптер и биндим его как обычно. Собственно, вот и вся наука! Теперь летаем, снимаем и наслаждаемся.
Фотографии




Инструкция
Здесь можно скачать инструкцию к подвесу Tarot T2D на русском (pdf):
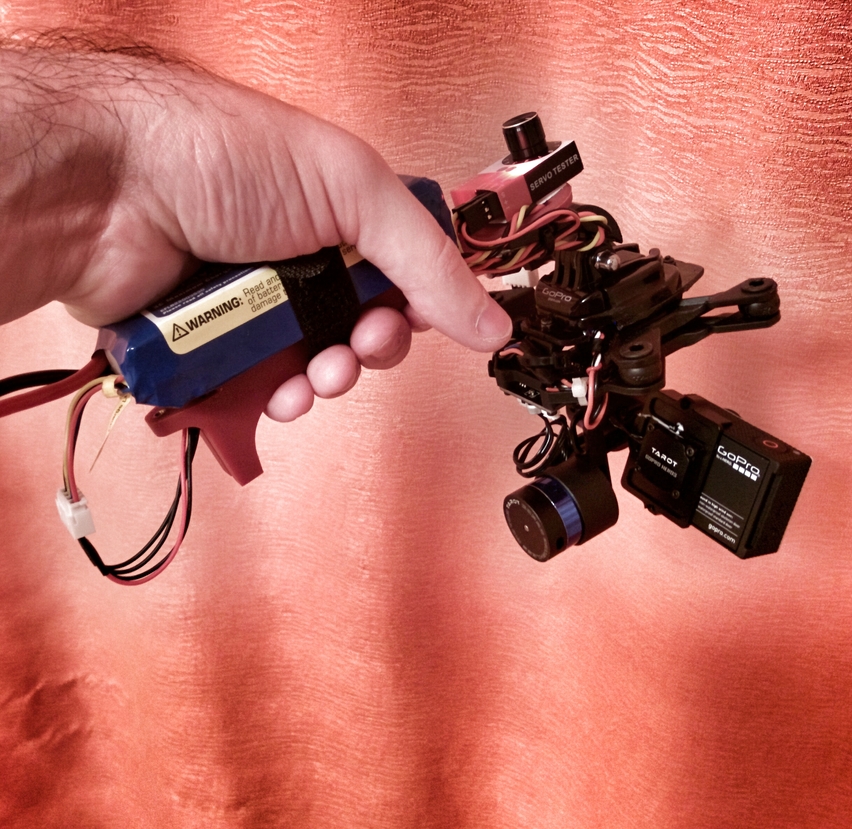
Стедикам из подвеса Tarot T2D
В качестве бонуса кратко расскажу, как я сделал ещё и стедикам из подвеса Tarot T2D. Я взял рукояnку (луч от рамы 330 - это первое, что нашлось), закрепил на ней такой же крепёж от GoPro, как и на квадрокоптере. Подвес получал питание так же (через балансировочный разъём) и от той же 3S батареи, что стояла на квадрокоптере. Уже при первом "полевом испытании" я понял, что использовать такой стедикам без возможности регулировки угла наклона камеры очень неудобно. Благо, реализовывалось это весьма просто. Понадобились серво-тестер с регулятором-"крутилкой" и стабилизатор напряжения BEC UBEC 3A 5V(2-5S), чтобы запитать серво-тестер от 3S батареи. В конструкции подвеса ничего менять не пришлось, а те провода, которые раньше шли с платы контроллера подвеса на приёмник (на схеме выше: синий и коричневый), теперь присоединялись к серво-тестеру.
В итоге получился неплохой 2-осевой стедикам, хотя и немного громоздкий, но зато при минимальных затратах. Ниже несколько фото этой конструкции:



Не накомментили ещё. Би зэ фёст!