


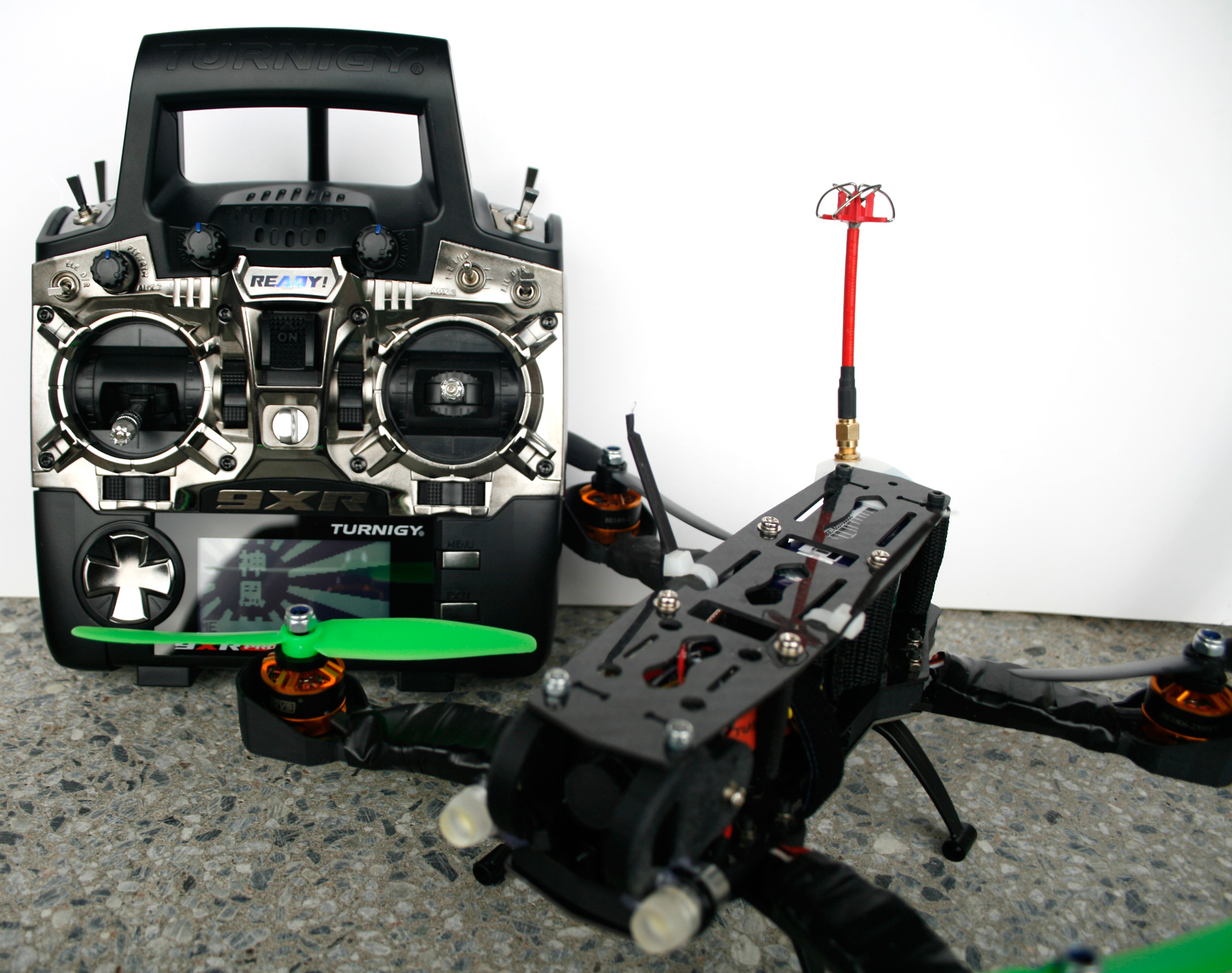
Сборка квадрокоптера на раме ZMR250 (часть 3) - установка FPV

Продолжим сборку нашего 250-го квадрокоптера. Следующий этап - установка FPV-оборудования. Мне всегда казалось, что с фото- и видеосъёмкой я скорее на "ты", чем на "вы", но тут я столкнулся с парой вопросов, о которых даже не подозревал. Так что для начала желательно ликвидировать пробелы в знаниях, почитав этот FAQ по FPV.
Во многих аспектах, данная статья выражает
субъективное мнение автора.
Спорить с ним бесполезно, он упёртый.
Подбор комплектующих
Начать проще всего с камеры и вот почему: подавать питание на неё я планирую с видео-передатчика, а значит мне необходимо знать рабочее напряжение камеры. Сперва надо определиться с типом матрицы: CCD (charge-coupled device, ПЗС — прибор с обратной зарядной связью) или CMOS (complementary metal-oxide-semiconductor, КМОП — комплементарная логика на транзисторах металл-оксид-полупроводник). Вот несколько полезных ссылок на эту тему:
Для себя я выбрал CCD. С объективами дела обстоят так: 2,8мм (угол обзора 86°) лучше всего подходит для полётов на небольшой высоте, 3,5мм (угол обзора 67°) - для большой высоты (в первую очередь для FPV на самолётах, хотя кому-то удобно и на 250-х квадрокоптерах с такой летать), а 2,1мм имеет слишком широкий угол и все объекты будут мелкими, а расстояния будет сложно оценивать. Мой выбор - 2,8мм. Ещё есть такая "фича", как инфракрасный фильтр (IR Block). В двух словах я затрагивал эту тему тут. Если говорить конкретно об FPV, то наличие этого фильтра делает цвета значительно насыщенее, но летать в темноте уже не получится. Без фильтра - всё наоборот.
Кроме того, надо выбрать в какой системе будет работать камера PAL или NTSC. Частота кадров первой равна или кратна 25, а второй - 30. Так как другие мои камеры (Panasonic и GoPro) снимают в NTSC, мне удобнее выбрать его и для FPV на случай, если придётся монтировать видео с разных камер. Под все эти требования подходит самая народная FPV-камера - Sony Super HAD CCD 600TVL с объективом 2,8мм. Она недорога и обеспечивает лучшее качество за свою цену. Более дорогие модели имеют более высокое разрешение, но по факту это не нужно, так как камера с 800TVL уже может создавать задержку в передаче картинки до 100мс. Для других моделей это, возможно, не так критично, но не для быстрого и юркого 250-го.
Кстати, если говорить о задержке сигнала непосредственно у камеры, тут играет роль как разрешение, так и тип матрицы. CCD матрица сначала собирает весь кадр целиком (это занимает примерно 40мс в режиме PAL и около 33мс в NTSC) и лишь потом отправляет его. CMOS матрица отправляет картинку построчно, что в теории значительно быстрее, но на практике обычно ещё применяется постобработка, также занимающая время и получается всё ещё медленее, чем у CCD. Также CMOS матрицы имеют побочные эффекты в виде "желе" и rolling-shutter'а. Конкретно Sony Super HAD CCD 600TVL имеет задержку, если верить форумам, около 30мс, что является очень хорошим показателем.

Теперь перейдём к передатчику. Тут всё куда сложнее, ибо ассортимент и разброс цен велики, вдобавок ещё и новые модели выходят часто. Надо исходить из собственных требований. Мне нужно питание на мою камеру (как и на почти все камеры с матрицей CCD) в 12В, RaceBand не нужен (не планирую лЁтать с друзьями), но каналов желательно чтоб было 32+. Последнее нужно для того, чтобы не оказаться в ситуации, когда приёмник и передатчик от разных производителей, оба имеют по 8 каналов, но ни один не совпадает.
Ещё один важный аспект - мощность. Вообще на форумах пишут, что и минимальных 25мВт вполне достаточно для квадрокоптеров 250-го размера, так как мало кто летает на них дальше 500 меторов. Тут важнее пробивная способность, чтобы сигнал не терялся за деревьями и кустами. Кроме того, есть тесты (раз и два), из которых видно, что нередко передатчики на 600мВт выдают лишь 350-400, равно как и передатчики на 200мВт могу выдавать те же 350-400мВт. Также надо учитывать, что все передатчики греются, причём если одни терпимо, то на вторые надо ставить дополнительный радиатор. Тут лучше заранее почитать отзывы. Кстати, те же тесты показывают, что мощность одного передатчика может сильно меняться в зависимости от выбранного канала.
Вобщем, как говорил Жванецкий: "Выбирай, но осторожно, но выбирай". Изначально мой выбор пал на Eachine TS832. Если я правильно понимаю, это клон одноимённой модели от Boscam, причём клон не единственный. Аналогичная модель выпускается под маркой FoxTech. К плюсам этого передатчика можно отнести удобство выбора канала, хорошее охлаждение и мощность в 600мВт (не факт), а также большое количество положительных отзывов на форумах. Получив его я... офигел. Он огромный настолько, что лезет в раму ZMR250 лишь вертикально. Я решил, что эдак он мне всю комноповку испортит и заказал более компактный Eachine ET600 (по идее, можно было даже взять идентичный по размеру и весу Eachine ET200), правда не учёл, что он выдаёт 5В на камеру, а не 12.
Штатную антенну я сразу решил заменить на более предпочтительный "клевер". Ассортимент этого добра велик, а цены варьируются от 3€ до 70€. Я остановился на "середнячке" с большим количеством положительных отзывов - комплекте из двух антенн AOMWAY 5.8G 3dBi с разъёмом RP-SMA. Кстати, на форумах иногда встречаются споры о взаимозаменяемости "клеверов" приёмника и передатчика. Всегда считалось, что 3-лепестковая антенна идёт к передатчику, а 4-лепестковая - к приёмнику, но в последнее время многие производители выпускают для обоих случаев антенны с четырьми лепестками. Судя по всему, для 250-х квадрокоптеров, учитывая расстояния их полётов, большой разницы нет. Для действительно же дальних полётов разница в антеннах, разумеется, есть.
Также я купил кабель-удлинитель RP-SMA (эта модель предпочтительнее) и недорогой LC-фильтр. Последний нужен для того чтобы убрать помехи, создаваемые в цепи регуляторами моторов. Ставится он на самое чувствительное к этому устройство - камеру. Если LC-фильтр не решил проблему с помехами (а такое бывает), то можно вдобавок к этому экранировать видеокабель, который идёт от камеры к передатчику.

Всё? Не совсем. В полёте всегда надо следить за уровнем батареи и даже если эта информация выводится у вас на пульте, крайне неудобно и даже вредно постоянно отвлекаться на неё. Единственный выход - OSD. Подробнее о том, что это такое и чего от этого ждать, можно прочитать в этой статье (на английском). Безусловным лидером по соотношению цена/качество является MinimOSD. Она даёт очень большие возможности (вплоть для изменения PID через OSD), но для работы с CC3D её надо перепрошивать (ссылка на прошивку). Я решил не заморачиваться со всем этим и выбрать предельно простой вариант, чтоб показывал только напряжение батареи. Я искал вариант побюджетнее и в итоге купил Super Simple Mini OSD. Правда, как выяснилось позднее, она не калибруется. То есть, если показания заряда не совсем верные, исправить это уже не получится. Забегая вперёд скажу, что замер по двум батареям (измерял зарядкой Imax B6) показал, что моя OSD показывает напряжение на 0,5-0,6В ниже реального. Так что, вместо неё, лучше купить калибруемую HobbyKing E-OSD, правда её цена почти вдвое выше.
На этом, говоря языком веб-программирования, с "серверной частью" было покончено. А что же с "клиентской"? У меня уже давно лежал без дела приёмник Boscam RC5808, который я и решил использовать. Одно время хотелось купить приёмник с возможностью записи видео (например, AOMWAY RX004), но потом я узнал про устройство видеозахвата EasyCap и отказался от дорогого приёмника, зато заказал сам EasyCap (точнее один из его многочисленных клонов).
Визуализировать же полученный сигнал будут сверхбюджетные очки (точнее шлем) Quanum Goggle V2.
Подобъём расходы (как и в прошлый раз, цены округлялись в большую сторону):
- камера 24€
- видео-передатчик 23€
- антенны-"клевера" 15€
- RP-SMA удлинитель 3€
- LC-фильтр 4€
- OSD 8€
- видеоприёмник 15€
- EasyCap 7€ (опционально)
- видео-очки 60€ (с доставкой)
Итого выходит 159€.
Сборка
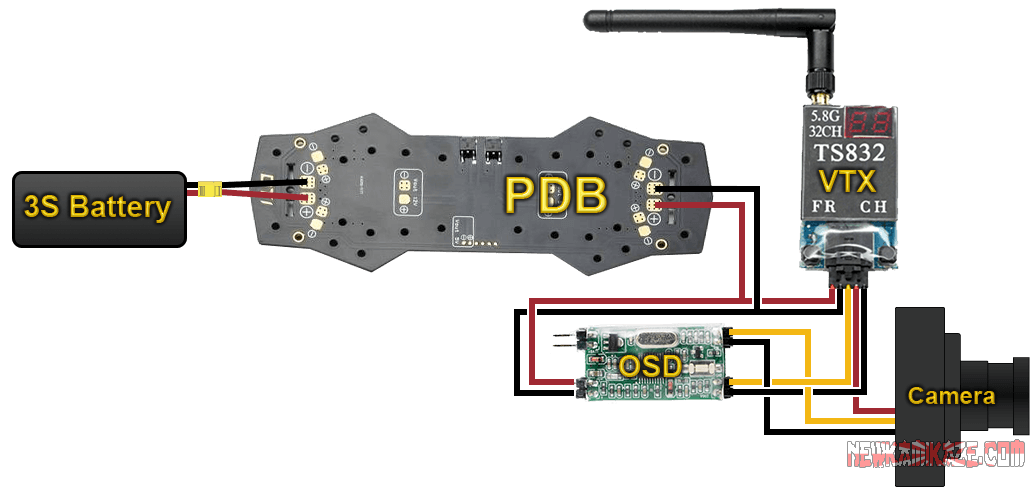
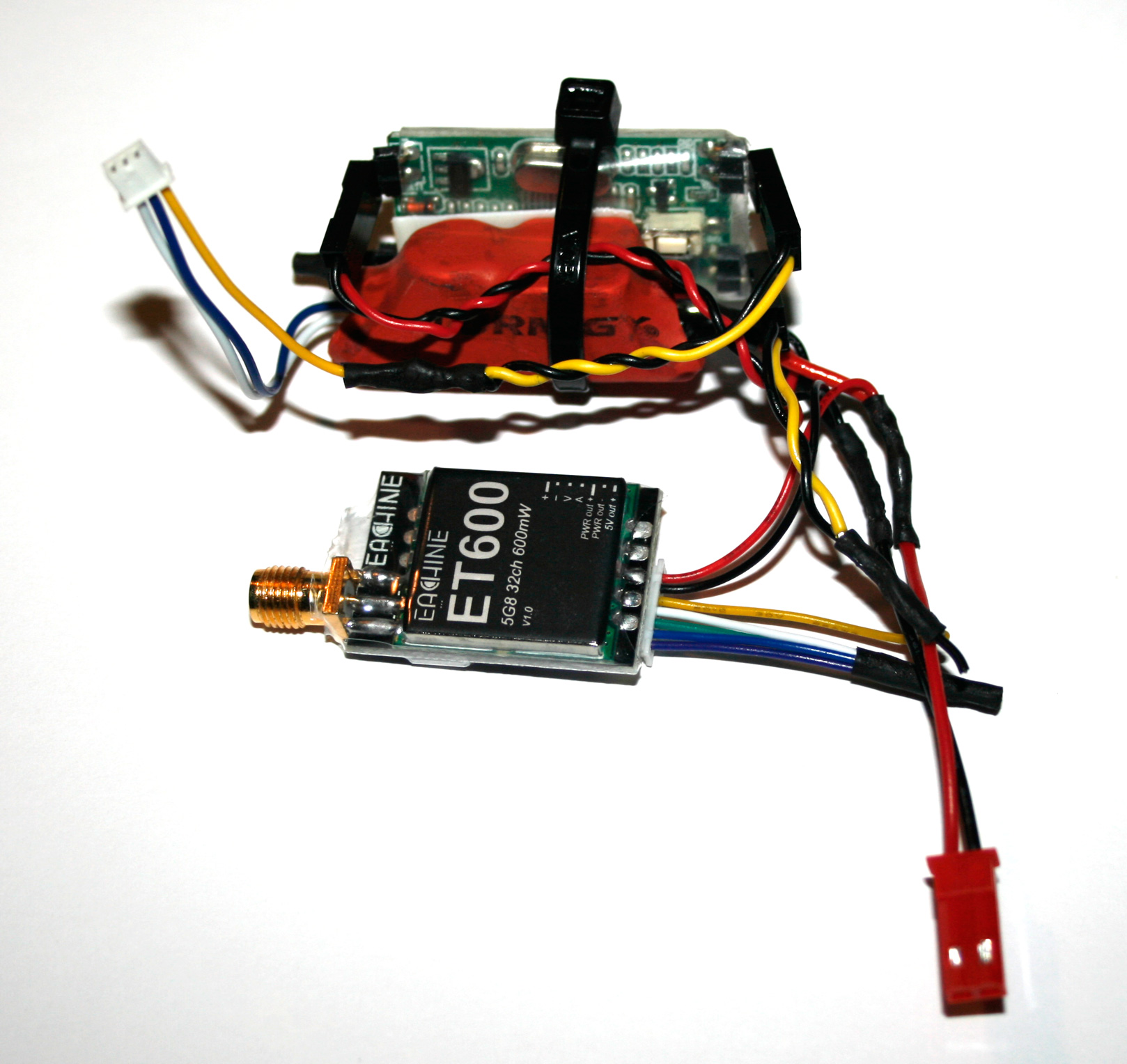
Получив все детали я подключил всё оборудование, чтобы проверить его работоспособность. Напомню, что я вывел два разъёма от батареи для питания FPV-оборудования и "фар". Кстати, ни в коем случае не включайте видеопередатчик без антенны - может сгореть. По проводке выходила такая схема:
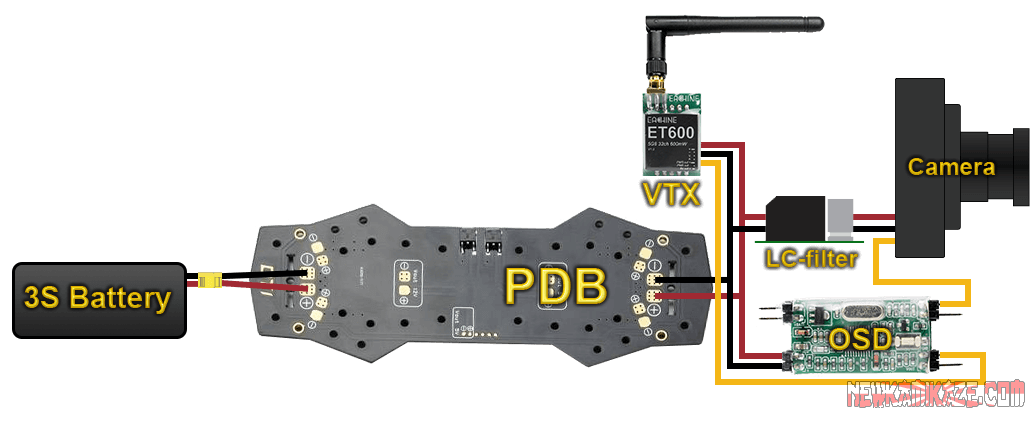
Позднее, когда я заменил видеопередатчик и мне пришлось запитывать камеру от батареи, она изменилась на такую:
На этом же этапе разумно настроить расположение OSD на экране (возможные варианты переключаются нажатием на единственную кнопку на OSD) и пареметры камеры. Рекомендуются следующие установки (источник), в скобках даны значения для камер без ИК-фильтра (IR sensrtive):
- Lens: Manual
- Exposure
- Shutter: AUTO
- Brightness: 042 (065)
- ACG: OFF
- DWDR: ON - очень важно, включает цифровое расширение динамического диапазона D-WDR
- Level: 063
- Return
- Return
- Backlight: OFF
- White Bal: ATW1
- Day & Night: Color
- Special
- Cam Title: ON
- Motion: OFF - детектора движения, нужен для охранных камер
- Privacy: OFF
- Park. Line: OFF - отображение парковочных линий, нужны, если использовать камеру в качестве авторегистратора
- Comm Adj
- Version
- Return
- Image Adj
- Lens Shad: ON
- Level: 080
- 2DNR: ON - включает цифровое подавление шума 2 DNR
- Mirror: OFF - зеркальное отражение картинки
- Font color
- Contrast: 105
- Sharpness: 23 (28)
- Display: LCD
- Gamma: 0.45
- Ped level: 026 (050)
- Color gain: 200 (250)
- Neg. Image: OFF
- Return
- Lens Shad: ON
- DPC
- Language: ENGLISH
- RESET
- EXIT
После этого желательно проверить фокусировку камеры. Если что-то с ней не в порядке, можно подстроить повращав объектив.
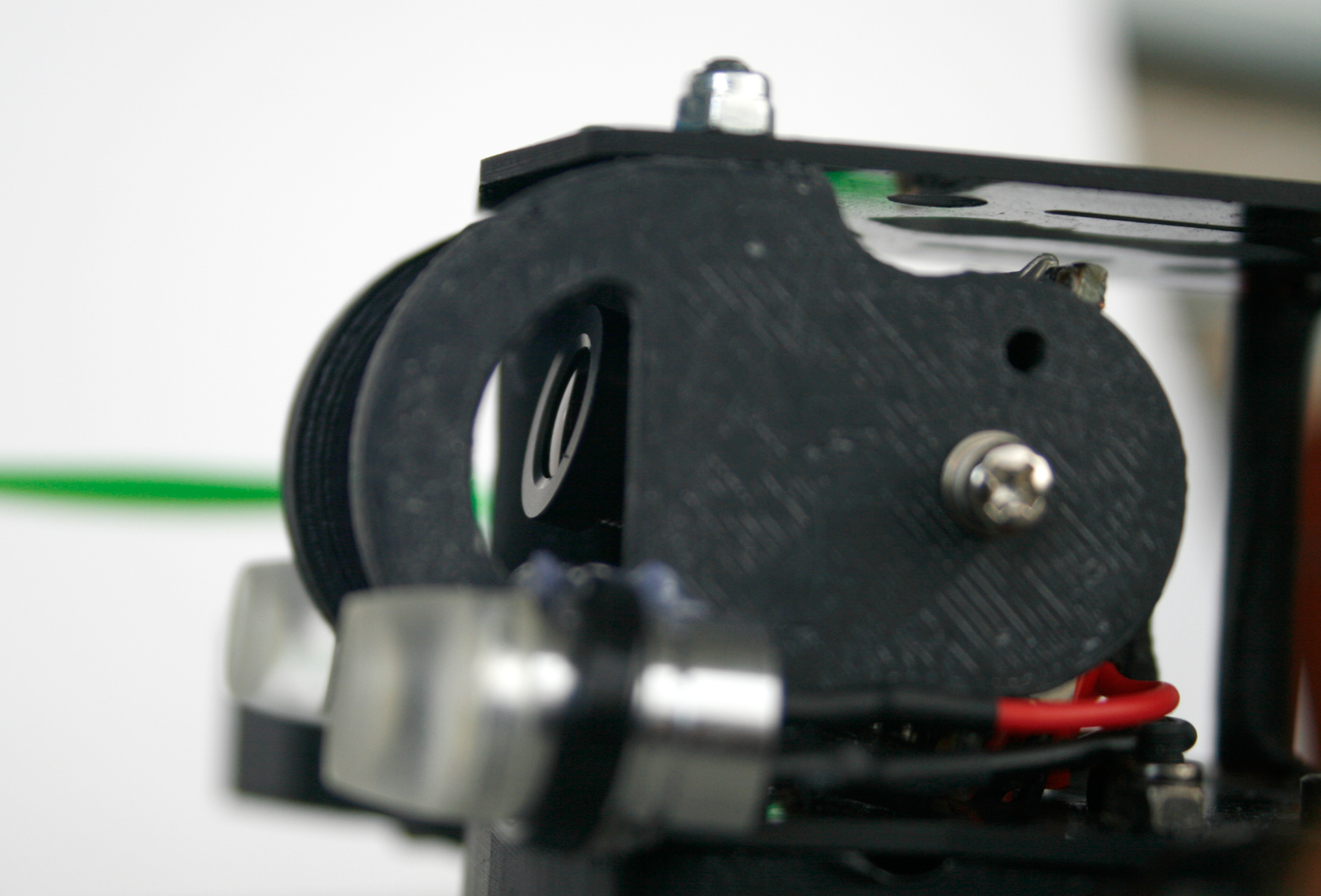
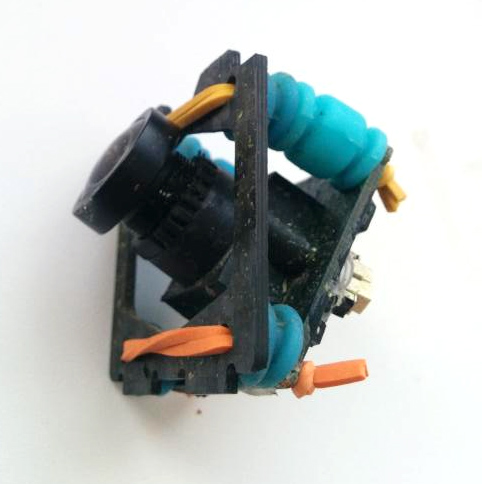
Установку оборудования на квадрокоптер я начал с камеры. Первым делом я обработал её плату диэлектрелизующим лаком, а затем подклеил термоклеем все более-менее крупные детали (а их там целая одна), чтобы они не отвалились при аварии. Для крепления камеры я заказал 3D-печать этих деталей (деталь из файла washer.stl я не печатал). Именно этот набор понравился возможностью менять угол камеры, а так же дугами, защищающими камеру при фронтальном столкновении. Далее выяснилось несколько не очень приятных вещей. Во-первых, моя камера не влезает в крепление, причём не влезает "конкретно". Самое умное, что я придумал - совсем отпилить заднюю стенку крепления и закрепить камеру на нём термоклеем.

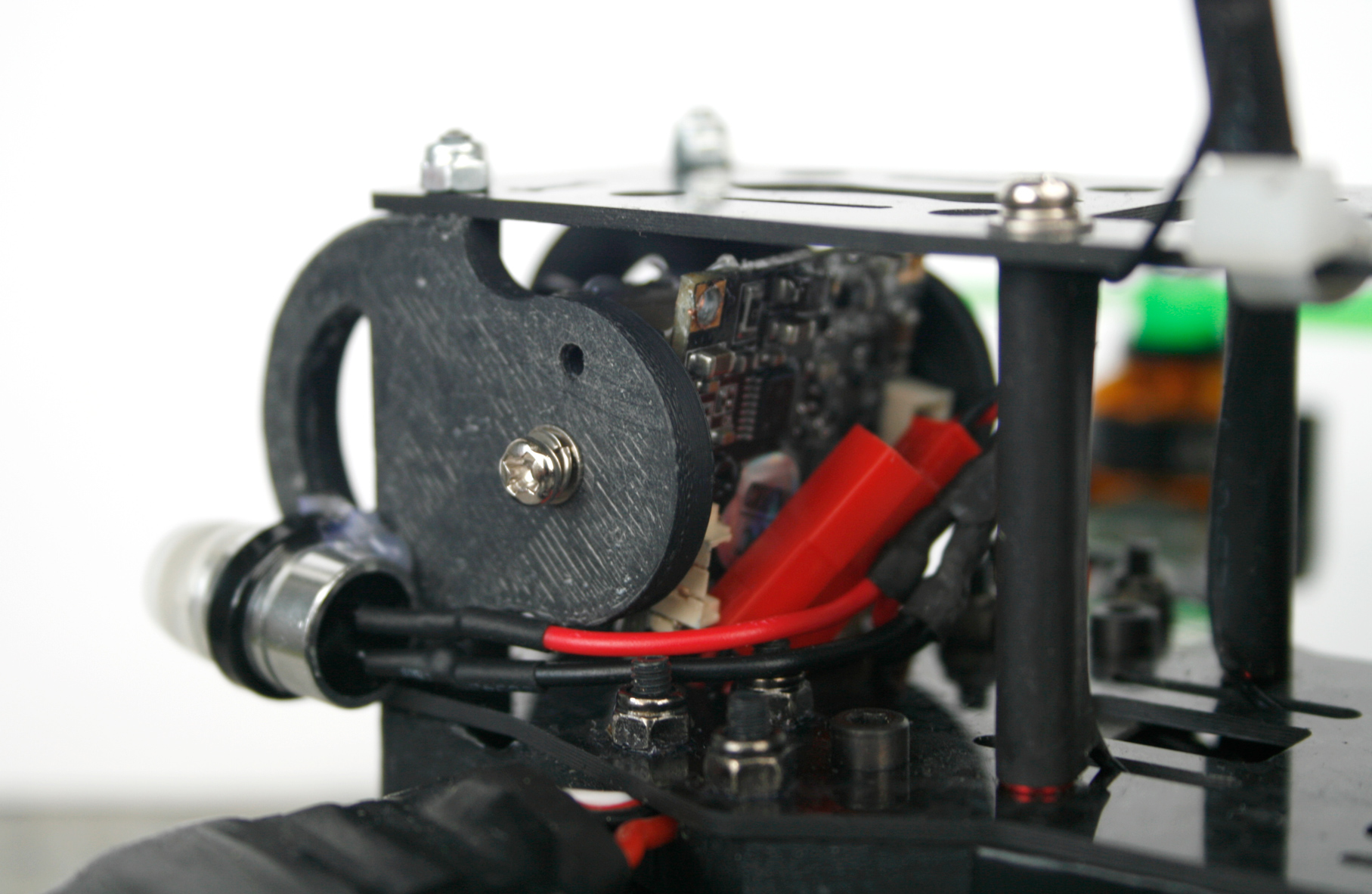
Во-вторых, выяснилось, что боковые детали одеваются не на алюминиевые стойки рамы, а вместо них. Вкручивать болтики в пластик показалось мне сомнительной затеей, поэтому я купил металлический прут с резьбой M3 и пропустил его отрезки через всю раму насквозь и закрутил гайками с нейлоновыми уплотнителями. Получилось очень прочно, хотя, возможно, в данном случае лучше наоборот: если вся конструкция камеры будет закреплена не очень жёстко, то в случае аварии сместится всем блоком, что спасёт камеру.


Вообще, часто рекомендуют крепить камеру через резиновые/силиконовые демпферы, как показано здесь.
На этом же этапе я стяжками и термоклеем закрепил "фары". К слову сказать, они оказались очень мощными (3Вт вместе) и, как следствие, прожорливыми, так что лучше поставить на них какой-нибудь тумблер, чтобы можно было включать перед полётом только по необходимости.
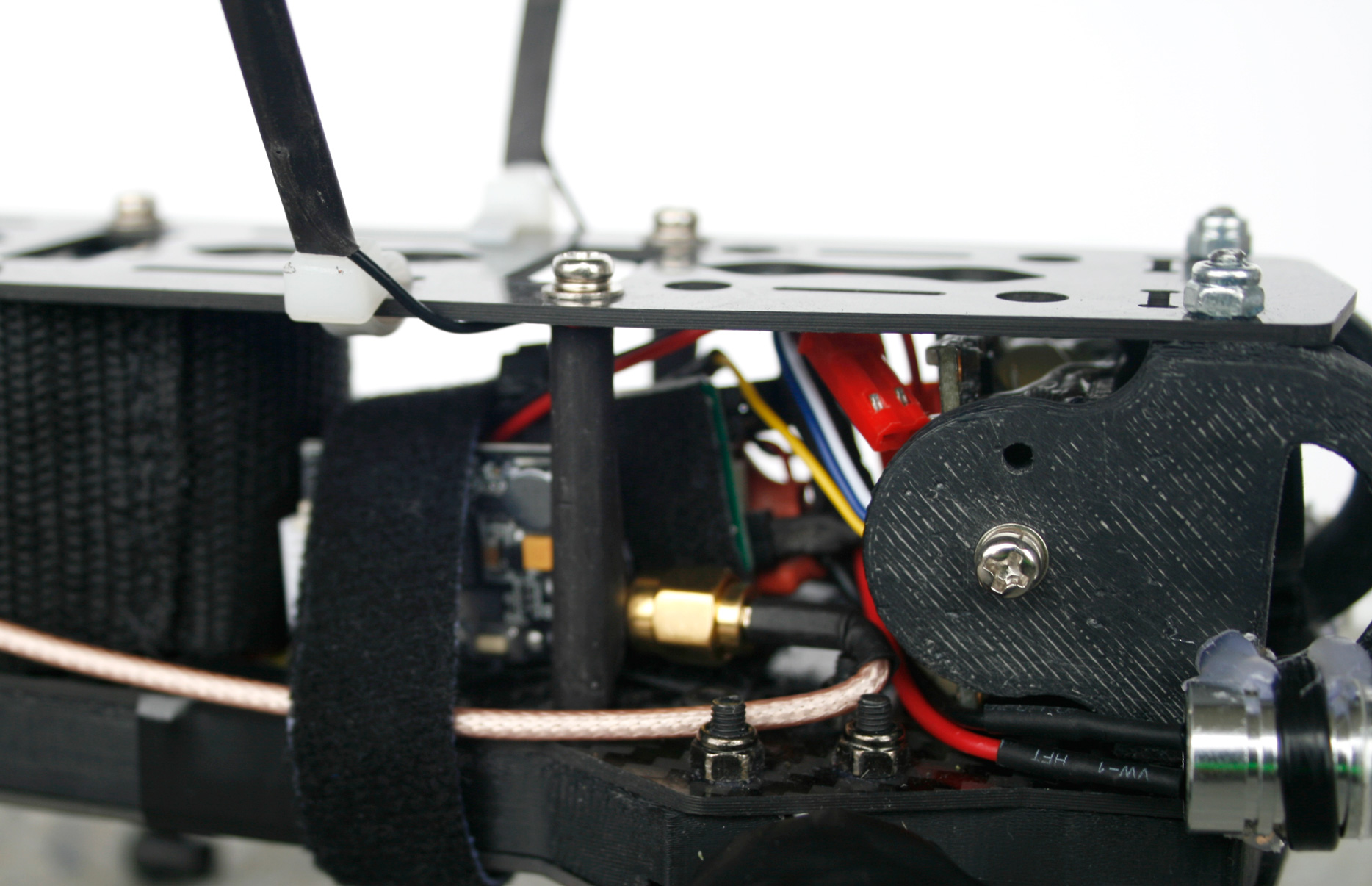
Теперь надо было разобраться с креплением антенны к видеопередатчику, а это, пожалуй, самый замысловатый момент во всей установке FPV. Во-первых, антенну ни в коем случае не стоит крепить непосредственно к передатчику. Получается своего рода рычаг, где одним плечом служит антенна, другим - сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник. Во-вторых, любой переходник сильно снижает мощность передатчика (пример). И в-третьих, антенна должна быть расположена вертикально или под очень небольшим углом.
Чаще всего передатчик крепят горизонтально снизу пластины рамы, а антенну выводят наверх через Г-образный переходник. Это вариант плох по двум причинам: 1) такой переходник сильнее всего снижает сигнал передатчика (на форумах пишут, что аж на 19%) и 2) соединение между антенной и передатчиком всё равно остаётся жёстким и опасность поломки разъёма при сильном ударе сохраняется. Гораздо предпочтительнее использовать вместо такого переходника гибкий SMA/RP-SMA удлинитель вроде того, что купил я. Оптимальная длина удлинителя для 250-го квадрокоптера - 5-8см, хотя зависит от конкретной компоновки. Мне, например, впритык хватило 15см. Кстати, короткие кабеля в продаже есть не всегда, но можно самостоятельно укоротить более длинный. Как это сделать, можно узнать тут, но следует учитывать, что на дешёвых китайских кабелях разъёмы одноразовые и если будете укорачивать такой кабель, лучше заранее купить новый SMA или RP-SMA разъём. Альтернативный вариант: при покупке на eBay связаться с продавцом и попросить его укоротить кабель до нужной длины. Иногда такое срабатывает.
Второй момент, надо, чтобы сама антенна (речь идёт о "клевере", а не о штатной "сосиске"), точнее её кабель, был достаточно мягким, либо крепить её так, чтобы при аварии антенна могла подогнуться и смягчить удар. Это минимизирует её повреждение при падении. Кстати, у моей антенны AOMWAY кабель очень жёсткий. Чтобы нивелировать это, я закрепил её на кусочке пластика, гибкого, но достаточно жёсткого, чтобы антенну не мотыляло от собственного веса. Оптимальным был баллон от строительного герметика, из которого я вырезал подходящий кусочек. Я немного сместил антенну относительно продольной оси квадрокоптера, чтобы она не мешала засовывать/доставать батарею.
Последний момент, касающийся антенны - защита лепестков от повреждения. У AOMWAY это сомнительные фиксаторы снизу лепестков, но чаще используются кожухи на всю конструкцию. Такой кожух можно изготовить и самостоятельно, например, из скорлупки от "киндер-сюрприза" или половинки теннисного мячика, только очень желательно, чтобы сам кожух не косался лепестков антенны.


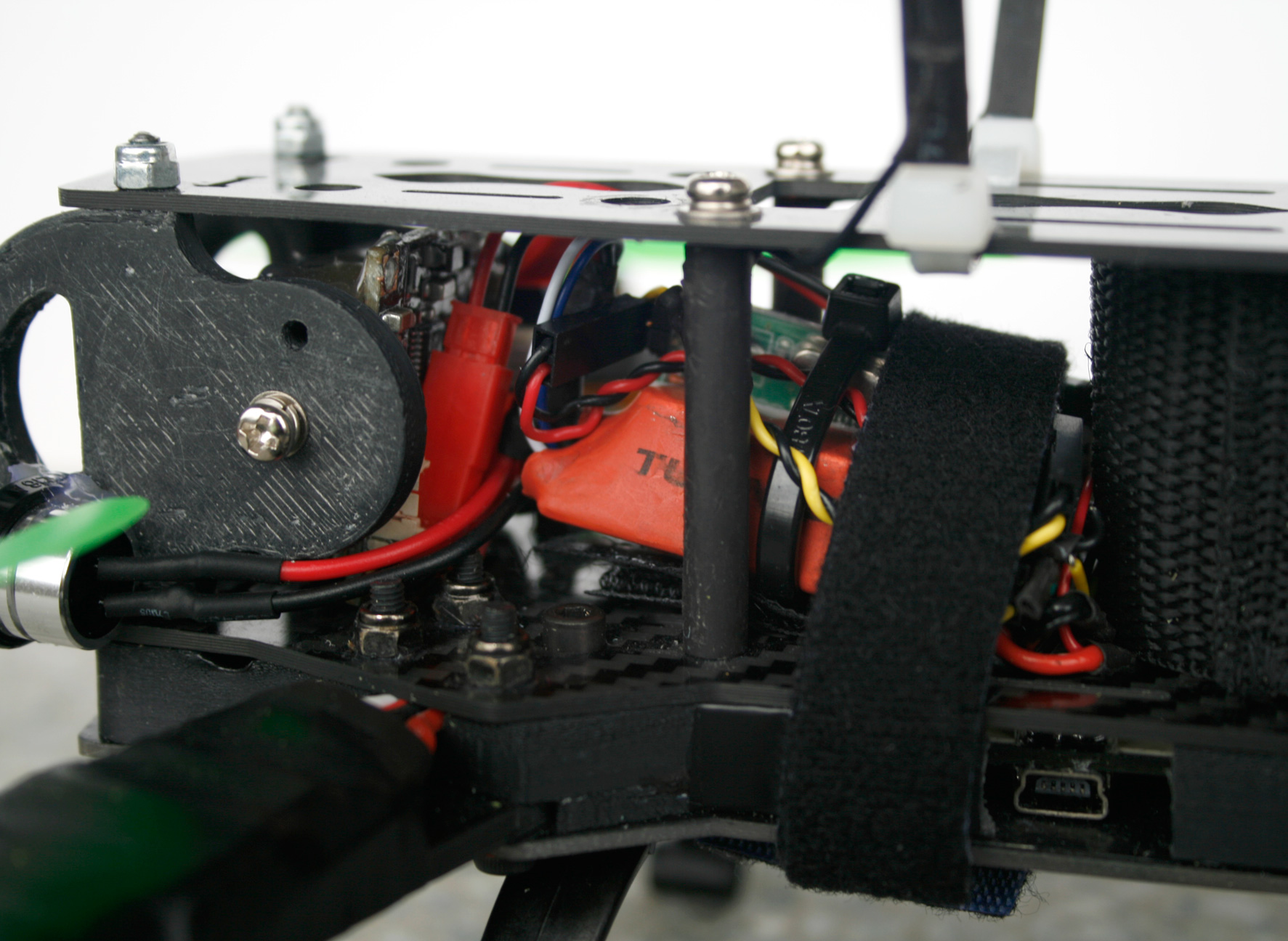
Последнее, что осталось - закрепить внутри корпуса видеопередатчик, OSD и LC-фильтр. Сначала я припаял провода к LC-фильтру и заплавил его в термоусадку. Плата OSD и видеопередатчик были запаяны производителями. Правда, на каждом из них есть по одной кнопке и я вырезал для них отверстия. Также, для пущей компактности, я загнул контакты на OSD на 90 градусов. После этого я ещё раз соединил все провода и проверил работает ли оборудование.
Теперь можно было крепить его внутри рамы. В этом мне очень помогла клейкая швейная липучка. Один небольшой кусочек я приклеил на раму, второй - на LC-фильтр. Затем я скрепил вместе LC-фильтр и OSD и приклеил их липучкой к раме. Чтобы липучка не мешала правильно разместить детали, постоянно сцепляясь, я прикрыл её кусочком бумаги, который потом вытащил. Передатчик я развернул кнопкой наружу (чтоб был удобный доступ), после чего обмотал всё это вместе с рамой ремешком-липучкой. С квадрокоптером на этом всё.
Не буду подробно останавливаться на сборке шлема Quanum Goggle V2, так как в богато иллюстрированной инструкции, идущей к нему в комплекте, этот процес исчерпывающе показан. Упомяну лишь пару моментов, которые могут быть полезными. Иногда владельцы этого шлема жалуются на то, что при включении моторов или вскоре после начала полёта (3-5 сек) отключается видеоприёмник. Проблема в том, что с монитора выходят два RCA-разъёма (они же "тюльпанчики") и на обоих видеосигнал, а на некоторых приёмниках по двум таким же разъёмам подается картинка и звук. Получается, что звуковой канал подключается к видеоканалу монитора и при небольшом нагреве приёмник отключается.
Вторая "полезность" заключается в том, что при наличии свободной камеры, можно закрепить её на передней части шлема и при посадке квадрокоптера переключаться с FPV-камеры на неё и визуально сажать модель, что значительно удобнее. Как это сделать, показано на этом видео. Плата для переключения между двумя источниками видео идёт в комплекте со шлемом.
Квадрокоптер готов к полётам, причём теперь уже по FPV. Его вес с батареей составил 580 г, без батареи - 460 г. Приятных полётов и мягких посадок.






Знатно накомментили:
Напиши продолжение про настройку ПИДов и настройку ЦЦ3Д в мануал режиме для АКРО-полётов
Если же будете настраивать в OpenPilot, вот видео, как это делается: https://youtu.be/DDxkhWSRUdM
Там же на канале есть аналогичное видео по LibrePilot.